PicoScope 7 Automotive
Available for Windows, Mac, and Linux, the next evolution of our diagnostic scope software is now available.
Automotive guided tests
Library of examples on how to perform tests when using PicoScope.

Training
Our collection of training videos, articles, guides and information on training courses.

Waveform library
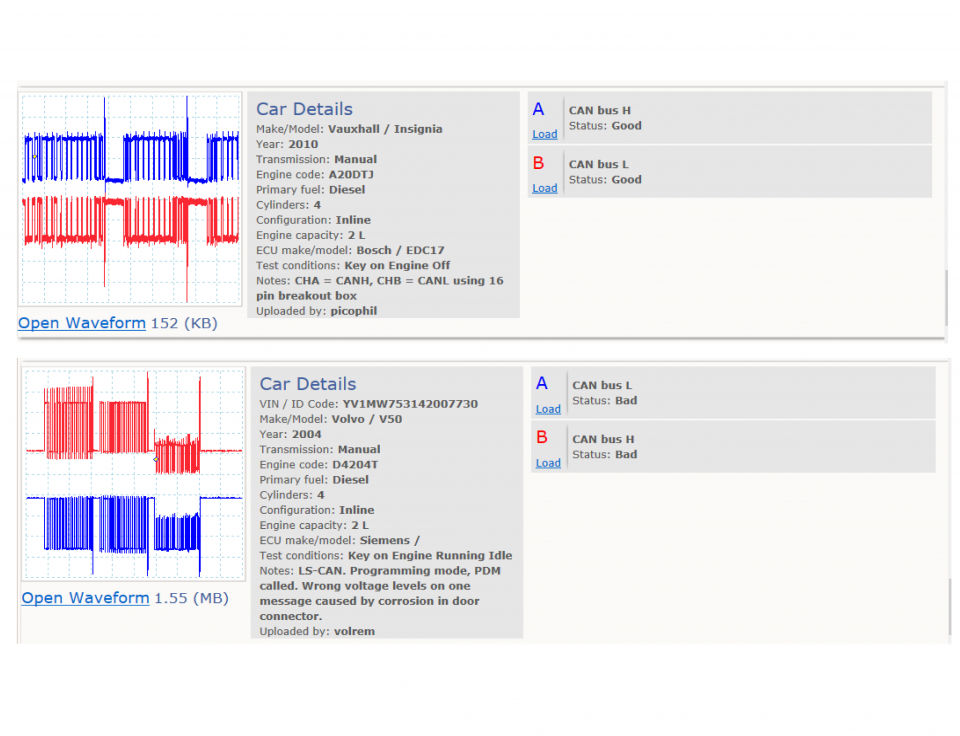
The Waveform Library is a global database of waveforms uploaded by PicoScope users.

Case studies
Real-life case studies show how the professionals use PicoScope to diagnose vehicle faults.

A to Z of PicoScope
Detailed description of various PicoScope software and hardware features.

Videos
Training resources and demonstrations on PicoScope and the Automotive Diagnostics Kit.

Newsletter
Archive of our monthly Automotive Newsletters.

Documentation
Download manuals, brochures, posters, and training materials.

Reviews and awards
Accolades for the preferred diagnostic tool for service centers and vehicle manufacturers.


CAN Test Box
*At Pico we are always looking to improve our products. The tool used in this guided test may have been superseded and the product above is our latest version used to diagnose the fault documented in this case study.
Mit diesem Test kann die physikalische Integrität des Busses in einem Controller Area Network (CAN) ermittelt werden, indem die niedrigen (CAN-L) und hohen (CAN-H) Leitungsspannungen überprüft werden.
Anmerkungen
Falls keine Wellenformen auf dem Bildschirm angezeigt werden, bietet der DLC möglicherweise keinen direkten Zugriff auf einen CAN-Bus. Verwenden Sie die Herstellerdaten, um den geeigneten Zugriff an anderer Stelle zu ermitteln.
Anmerkungen zur Wellenform
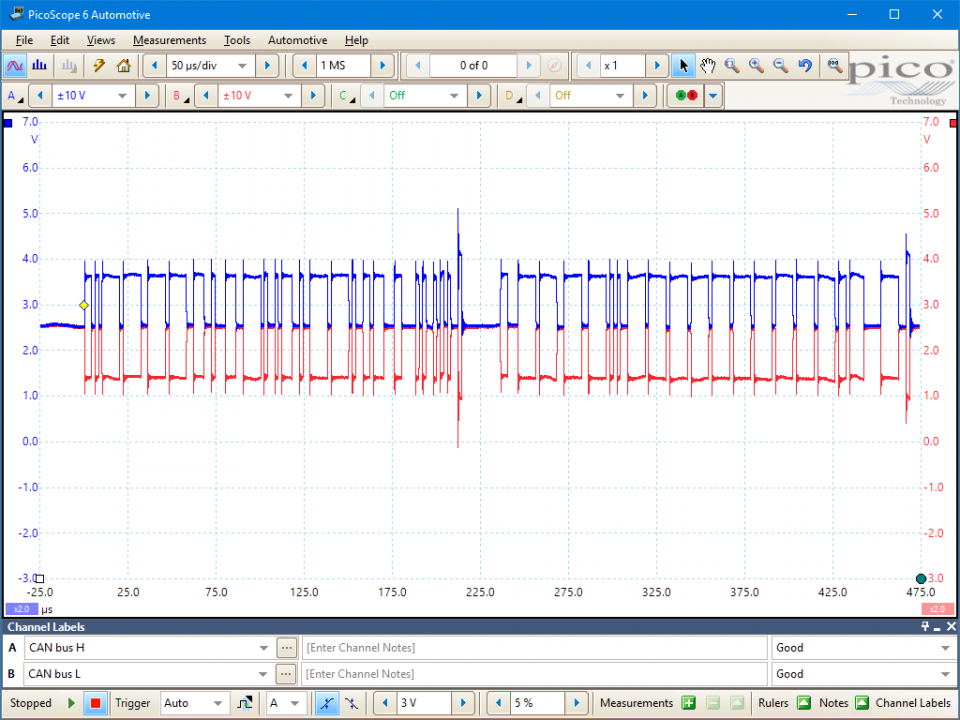
Diese bekanntermaßen guten Wellenformen haben die folgenden Kennwerte:
Die Wellenformen CAN-L und CAN-H spiegeln einander bei ca. 2,5 V und ihre Spitze-Spitze-Amplitude beträgt 1 V.
Die Wellenform CAN-L wechselt von 2,5 V auf 1,5 V und die Wellenform CAN-H wechselt von 2,5 V auf 3,5 V.
Die niedrigen und hohen Spannungen und Übergänge zwischen ihnen weisen kein signifikantes Rauschen oder Verzerrungen auf.
Zwei vollständige CAN-Nachrichten, jeweils mit erhöhter Spannung am Ende.
Im Zeitraum zwischen den Nachrichten verbleiben CAN-L und CAN-H bei 2,5 V.
Die kürzeste Dauer zwischen dem Umschalten in einen Spannungszustand und wieder zurück beträgt 2 Sekunden, woraus auf eine Busgeschwindigkeit von 500 kbit/s geschlossen werden kann.
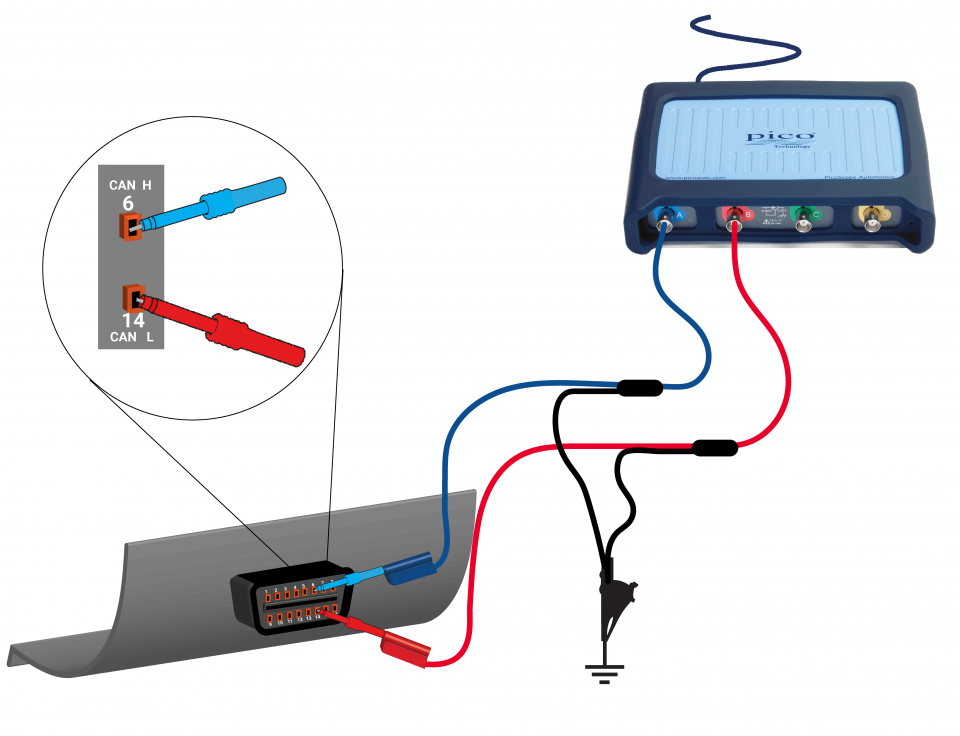
Gehen Sie zur Dropdown-Menüleiste in der linken unteren Ecke des Fensters Waveform Library und wählen Sie CAN-Bus H oder CAN-Bus L aus.
Ein CAN-Bus ermöglicht serielle Kommunikation zwischen Steuereinheiten. Beispielsweise ermöglicht ein CAN-Bus des Antriebsstrangs einer ABS-Steuereinheit das gleichzeitige Senden einer Nachricht mit Raddrehzahldaten an das Motorsteuerungsmodul (ECM), das Getriebesteuerungsmodul (TCM), das Kombi-Instrument (IC) und die zusätzliche Rückhalteeinrichtung (SRS).
CAN-Nachrichten werden digital als eine Reihe niedriger und hoher Werte innerhalb einer als Frame bezeichneten festen Struktur übertragen. Die kleinste Dateneinheit innerhalb dieser binär codierten Nachrichten ist ein Bit, das logisch für entweder 0 oder 1 steht. Eine Nachrichtenkennung folgt dem Start des Frames. Die Kennung dient zur Entscheidung zwischen Nachrichten, wenn zwei oder mehr Steuereinheiten zur selben Zeit versuchen, eine Nachricht zu senden; je niedriger der Wert der Kennung, desto höher die Priorität der Nachricht. Verschiedene Werte einschließlich der Datennutzlast und eine Prüfsumme folgen auf die Kennung.
Wenn eine Steuereinheit eine Nachricht empfängt, berechnet sie eine Prüfsumme aus der Datennutzlast und vergleicht sie mit dem in der Nachricht übertragenen Wert. Wenn die beiden gleich sind, ist die Nachricht gültig. Die empfangende Steuereinheit bestätigt dies durch das Übertragen einer Quittierung während des vorletzten Bits der übertragenen Nachricht. Somit kann die übertragende Einheit erkennen, ob eine Steuereinheit eine ungültige Nachricht empfangen hat.
CAN-Busse weisen entweder eine geringe oder hohe Geschwindigkeit auf; Low-Speed-Busse kommunizieren mit einer festen Rate von bis zu 125 kbit/s, während High-Speed-Busse mit einer festen Rate von bis zu 1 Mbit/s kommunizieren. Die Variante CAN FD kommuniziert bei variablen Raten von bis zu 12 Mbit/s. Die Busgeschwindigkeit wird durch die Anwendung festgelegt. Beispielsweise erfordern sicherheitskritische CAN-Busse des Antriebsstrangs Echtzeitkommunikation und weisen daher stets eine hohe Geschwindigkeit auf, typischerweise mit einer Rate von 500 kbit/s.
CAN-Gateways verbinden Busse unterschiedlicher Geschwindigkeiten oder Typen. Beispielsweise kann ein IC als Schnittstelle zwischen dem Antriebsstrang und den CAN-Bussen von Komfortsystemen fungieren, um u. a. die Funktion der automatischen Türverriegelung zu gewährleisten; z. B. kann eine die Fahrzeuggeschwindigkeit betreffende Meldung von der ABS-Steuereinheit am Bus mit höherer Geschwindigkeit über das IC an die Komfort-Steuereinheit am Bus mit geringerer Geschwindigkeit übertragen werden. Das Komfort-Steuermodul kann in diesem Fall die Türen verriegeln, wenn eine bestimmte Geschwindigkeit erreicht wurde.
Gateways können auch den Zugriff zur Fehlerdiagnose steuern. Sofern vorhanden, müssen Testgeräte zur Fehlerdiagnose die Verbindung mit dem Gateway über den DLC aufnehmen. Das Gateway übermittelt danach Nachrichten zur Fehlerdiagnose zwischen dem Prüfgerät und den anderen Steuereinheiten. Das Prüfgerät kann nicht direkt auf die anderen CAN-Busse oder deren Nachrichten zugreifen. Außerdem ist es nicht möglich, den DLC als Zugriffspunkt zur Prüfung der Integrität des CAN-Busses zu nutzen. Es müssen alternative Testorte identifiziert werden.
Die Spannungsdifferenz zwischen den Leitungen CAN-L und CAN-H steht für den logischen Status des Busses. Aus diesem Grund sind die Leitungen aufeinander bezogen und nicht auf ein externes Potenzial wie die Fahrgestellmasse. Diese Differenzialeinrichtung verbessert die Rauschunterdrückung, da Störungen die Leitungen gleichermaßen betreffen und die Spannungsdifferenz aufrechterhalten wird. Typischerweise sind die Leitungen als verdrillte Aderpaare konfiguriert, um die Störungsauswirkungen zu reduzieren.
Bei manchen CAN-Bussen, bei denen sich verbundene Steuereinheiten ein gemeinsames Bezugspotenzial (z. B. die Fahrgestellmasse) teilen, können die CAN-Controller auf Single-Line-Betrieb umschalten, um für Fehlertoleranz bei Auftreten eines offenen Stromkreises auf der Leitung CAN-L oder CAN-H zu sorgen.
High-Speed-CAN-Busse nutzen Abschlusswiderstände zum Beseitigen von Übertragungsreflexionen im Bus; ohne die Widerstände können Übertragungen von den Endpunkten zurückgeworfen werden und die Nachrichten verzerren. Typischerweise wird ein 120-Ohm-Widerstand verwendet, um die Leitungen CAN-L und CAN-H in den beiden Steuereinheiten am jeweiligen Ende des Busses zu verbinden. In dieser parallelen Konfiguration beträgt der Gesamtwiderstand zwischen den Leitungen CAN-L und CAN-H ungefähr 60 Ohm. Daher geben Messungen dieses Widerstands die Integrität des Busses an. Widerstandsmessungen dürfen nicht an Bussen ohne Abschlusswiderstände vorgenommen werden, sofern nicht zuvor die Verbindung zu allen Steuereinheiten getrennt wurde.
Störungen von CAN-Bussen können viele Symptome verursachen. Typischerweise sind sie durch einen teilweisen oder gesamten Verlust der Fahrzeug- oder Systemfunktionalität bzw. eine optische oder akustische Warnung an den Fahrzeugführer gekennzeichnet.
CAN-Busse können anfällig für Stromkreisfehler sein, z. B.:
In ähnlicher Weise können die verbundenen Steuereinheiten anfällig für Fehler sein bei:
GT126-DE
Disclaimer
This help topic is subject to changes without notification. The information within is carefully checked and considered to be correct. This information is an example of our investigations and findings and is not a definitive procedure.
Pico Technology accepts no responsibility for inaccuracies. Each vehicle may be different and require unique test
settings.














