PicoScope 7 Automotive
Available for Windows, Mac, and Linux, the next evolution of our diagnostic scope software is now available.
Automotive guided tests
Library of examples on how to perform tests when using PicoScope.

Training
Our collection of training videos, articles, guides and information on training courses.

Waveform library
The Waveform Library is a global database of waveforms uploaded by PicoScope users.

Case studies
Real-life case studies show how the professionals use PicoScope to diagnose vehicle faults.

A to Z of PicoScope
Detailed description of various PicoScope software and hardware features.

Videos
Training resources and demonstrations on PicoScope and the Automotive Diagnostics Kit.

Newsletter
Archive of our monthly Automotive Newsletters.

Documentation
Download manuals, brochures, posters, and training materials.

Reviews and awards
Accolades for the preferred diagnostic tool for service centers and vehicle manufacturers.

I riferimenti dell’anello di pick-up riportati di seguito si riferiscono ad un numero di possibili componenti:
|
|
|
|
|
|
Lo scopo di questo test è di valutare il funzionamento di un sensore di posizione albero a gomiti (CPS) stile induttivo con un circuito di ritorno di terra (massa non flottante)
Nota: Il corretto funzionamento del CPS stile induttivo flottante dipende dall'integrità degli avvolgimenti della bobina interna del CPS, dal circuito del CPS, dal montaggio del sistema CPS in relazione al pick-up e dal traferro tra il CPS e l’anello di pick-up.
La procedura di test descritta di seguito presuppone che le condizioni sopra menzionate siano tutte rispettate e che il CPS funzioni correttamente. Eventuali errori identificati con il funzionamento del sistema CPS, mentre lo svolgimento di questi test non indica necessariamente un errore con il CPS stesso.
Il CPS visualizzerà caratteristiche operative che sono incoerenti a causa di errori di circuito, interferenza elettromagnetica, guasti meccanici (anello di pick-up) o errori di misurazione/connessione. I risultati ottenuti sono quindi sintomi di condizioni sottostanti e non a seguito di un guasto CPS. È pertanto fondamentale eseguire un controllo di base di tutti gli elementi sopra prima di effettuare le misurazioni, per evitare una diagnosi errata del CPS.
Tutte le letture numeriche citate in questa sezione sono tipiche e non sono applicabili a tutti gli stili di motore.
|
Accessori |
Impostazioni di PicoScope
|
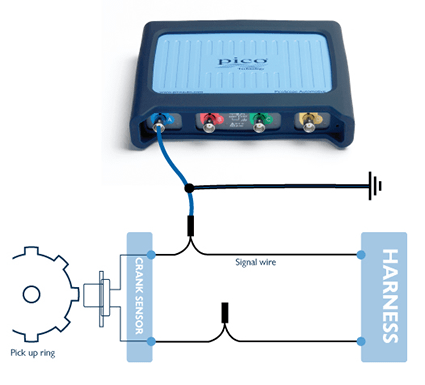
Utilizzando lo schema di cablaggio del veicolo, identificare il filo del segnale del CPS.
Il tipo induttivo CPS utilizzerà generalmente due fili, uno dei quali porta il segnale durante l’avviamento e l'altro, zero volt.
Tutti i valori inclusi nelle forme d'onda di esempio sono tipici e non specifici per tutti i tipi di veicoli.
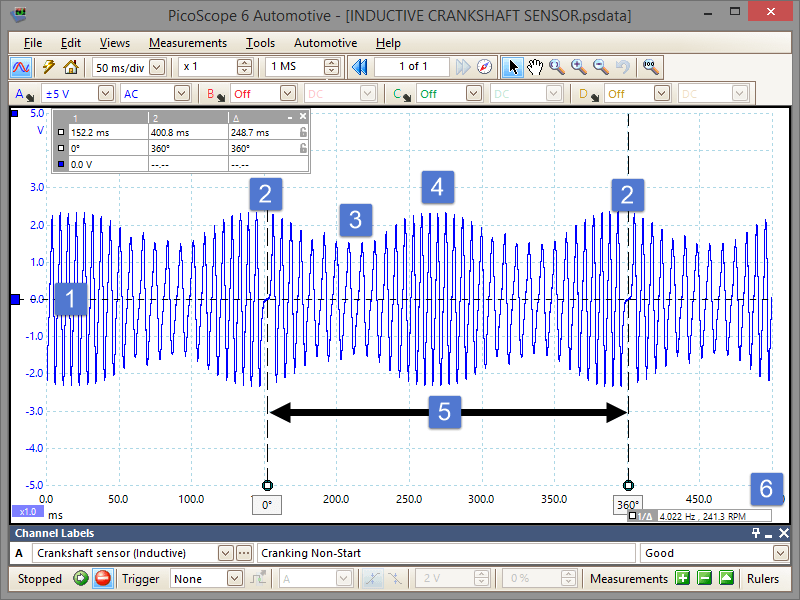
Canale A. Figura 2 (forma d'onda esempio 1) indica l'uscita di tensione c.a. del CPS mentre viene avviato a 50 ms/div per visualizzare 1 giro dell’albero a gomiti su uno schermo.
Canale A. Figura 3 (forma d'onda esempio 2) indica l'uscita di tensione c.a. del CPS mentre viene avviato a 20 ms/div per evidenziare i singoli denti e il dente/i denti mancanti dell'anello di pick-up.
Fare riferimento ai dati tecnici del veicolo per le condizioni ed i risultati dei test specifici.
Valori tipici
Avviamento del motore: Non-avvio
① Il righello di segnale a zero volt deve passare attraverso il centro della forma d'onda di CPS.
② Indica i denti mancanti dall'anello di pick-up del CPS, spesso scambiato per TDC (si veda la sezione Note sulla Diagnosi sottostante).
③ Ampiezza minima della tensione del segnale di uscita CPS a causa della riduzione nella velocità di avviamento come risultato della fase di compressione (si vedano Ulteriori informazioni qui di seguito).
④ Ampiezza massima della tensione del segnale di uscita CPS a causa dell’aumento nella velocità di avviamento come risultato della fase di espansione (si vedano Ulteriori informazioni qui di seguito).
⑤ La durata e i capi di rotazione denotano un giro dell'albero a gomiti fra i denti mancanti dell'anello di pick-up (35 denti in un solo giro dell'albero motore con un dente mancante, che indica la posizione dell'albero motore).
⑥ Indica la velocità corrente di avviamento del motore basato sulla posizione dei righelli di tempo ⑤. I righelli di tempo disposti ai successivi denti mancanti dell'anello di pick-up consentono al PicoScope di calcolare la frequenza di 1 ciclo completo (rivoluzione) dell'albero a gomiti. Sia la frequenza e, ancora più importante, il numero di giri, vengono visualizzati al punto ⑥.
Il CPS deve essere considerata una delle componenti fondamentali del sistema di gestione del motore dei nostri giorni. Mentre estremamente semplice nella costruzione, il corretto funzionamento del sistema CPS è fondamentale per un motore efficiente in esecuzione. Per apprezzare appieno il ruolo svolto dal CPS induttivo, dobbiamo capire il principio operativo dietro la tensione c.a. generata da un componente cosi critico. Una volta capito come funziona questo componente, possiamo valutare la causa di eventuali errori all'interno della nostra forma d'onda.
Il CPS induttivo è costituito da due componenti essenziali, una bobina di filo avvolta attorno ad un magnete permanente.
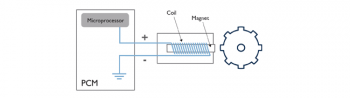
Figure 4 - CPS Operating principle
Ogni estremità della bobina filo termina presso il PCM dove la tensione c.a. del segnale di uscita generata viene utilizzata dal PCM per indicare la velocità dell'albero a gomiti e la posizione, mentre il filo rimanente della bobina (-) è collegato ai riferimenti a terra (vedere la Figura 6).
Il magnete permanente contenuto nel CPS produrrà in modo naturale un campo magnetico sugli avvolgimenti della bobina. Qualora un oggetto metallico dovesse essere introdotto in questo campo magnetico (sotto forma del nostro anello di pick-up), l'intensità del campo magnetico varierà e aumenterà o diminuirà a seconda della velocità e della direzione di marcia dell’anello di pick-up (vedere la Figura 7). La variazione nel campo magnetico ha l'effetto desiderato di indurre una tensione c.a. nell'avvolgimento della bobine che possa essere utilizzato dal PCM per indicare la posizione e la velocità del motore.
N.B. La variazione nel campo magnetico è responsabile solamente dell'induzione di una tensione c.a. nell’avvolgimento della bobina. Qualora l'anello di pick-up dovesse fermarsi, nessuna tensione verrà generata indipendentemente dalla posizione dell'anello di pick-up in relazione al CPS.
Figure 5
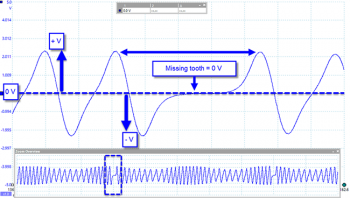
Figure 6
La forma d'onda CPS includerà una caduta di suono nel segnale dove l'anello di pick-up ha una lacuna intenzionale (dente o denti mancante/i) nella spaziatura uniforme tra i denti (vedere la Fig. 8 e la Figura 3).
Il PCM utilizzerà questa caduta di suono nel segnale per identificare la posizione dell'albero a gomiti che può o non può riferirsi al TDC. I produttori utilizzeranno i denti mancanti dall'anello di pick-up per indicare una varietà di posizioni dell'albero a gomito. Es. Pistoni in linea, TDC (posizione di sicurezza del motore), il no. di gradi prima del TDC, o possono scegliere una combinazione di denti mancanti a intervalli di 90 gradi. Per la valutazione accurata del segnale di riferimento della posizione dell'albero a gomiti, consultare il manuale di laboratorio rilevante.
Il calcolo della velocità dell'albero a gomito è basata sulla frequenza del segnale in uscita c.a. da CPS. Siccome la velocità dell'albero a gomiti aumenta la frequenza del CPS, il segnale in uscita aumenterà in modo direttamente proporzionale. L'ampiezza del segnale aumenterà anche con velocità del motore superiore a 20 V c.a. a velocità del motore più alte (vedere la Figura 9).

Figure 7
L’ascesa e la caduta di frequenza/ampiezza possono essere viste in Figura 2 e Figura 3 dove il carico posto sull'albero a gomiti durante la fase di compressione risulta in una momentanea riduzione della velocità dell'albero a gomito ③. Qui possiamo vedere una diminuzione nella frequenza e una diminuzione dell'ampiezza in diretto contrasto con ④ dove l'albero a gomiti aumenterà momentaneamente in velocità, subito dopo la compressione di TDC (fase di espansione) che comporta un aumento della frequenza e un aumento in ampiezza.
L'ascesa e la caduta in ampiezza e frequenza possono essere utilizzati come un'indicazione della condizione di compressione del motore. Supponendo che tutte le compressioni del motore sono uguali, dovremmo ottenere un aumento e una caduta uniformi del segnale CPS, con una costante velocità di avviamento.
La velocità di avviamento è un ingresso PCM critico da considerare quando ci sono reclami sull’accensione scarsa o sull’avviamento prolungato.
La velocità di avviamento può essere calcolata dal segnale CPS, inserendo i righelli di tempo in ogni punto consecutivo di caduta di suono nel segnale catturato (dente/denti mancanti), vedere la Figura 2 ②.
La maggior parte degli anelli di pick-up conterrà 36 o 60 denti con 1 o 2 denti mancanti in un unico punto sulla loro circonferenza. Posizionando i righelli di tempo direttamente presso i punti di interruzione indicherà 1 giro dell’albero a gomiti. Nelle Forme d'onda esempio di cui sopra, abbiamo 35 denti tra i righelli di tempo, avendo cosi un anello di pick-up con 35 denti con la circonferenza con 1 dente mancante per riferimento di posizione del motore (36 denti − 1 dente = 1 giro dell'albero a gomito).
Posizionando un righello temporale in punti di caduta del suono consecutivi all'interno della forma d'onda, sarà permesso al PicoScope di calcolare la velocità corrente di avviamento in base alla frequenza dell'albero a gomiti (cicli al secondo).
Nella Figura 2, ogni righello temporale è posizionato nel punto dei denti mancanti ② (un giro di un albero a gomiti) dove la frequenza tra le righe di tempo viene calcolata a 4,022 Hz nella leggenda di frequenza ⑥.
Allo scopo di convertire la frequenza giri/min bisogna solo 4,022 Hz per 60 per ottenere 241,3 giri/min. Sia la frequenza che il valore giri/min del motore vengono visualizzati nella legenda della frequenza ⑥.
Il sensore di posizione dell’albero a gomiti installato e scollegato dal cablaggio del veicolo
Il valore della resistenza del filo della bobina avvolto intorno al magnete permanente fornisce un'indicazione dell'integrità del sistema CPS ed è essenziale per la corretta tensione/il corretto segnale. I valori di resistenza non corretti o un corto circuito nella massa veicolo si tradurranno in un errore del segnale di uscita.
I valori di resistenza del filo della bobina CPS tipici variano tra produttori e quindi fare riferimento al manuale dell’officina rilevante per le specifiche corrette.
Al fine di verificare il valore di resistenza del sistema CPS, scollegare il sensore dal cablaggio del veicolo e collegare un ohmmetro, come illustrato in figura 10 qui sotto:

Figure 8

Figure 9
Mentre la resistenza di CPS può essere tra le caratteristiche, un controllo per un corto circuito a terra può inoltre essere eseguito molto rapidamente allo stesso tempo del controllo della resistenza. Figura 11 indica come è collegato l'ohmmetro, per confermare che non è presente alcun corto circuito alla massa del veicolo. Un valore maggiore di 10 kOhm è sufficiente per confermare che non esiste alcun corto circuito (è desiderabile un valore di resistenza del circuito infinito o aperto).
Il sensore di posizione dell’albero a gomiti installato e collegato al cablaggio del veicolo
In base al fornitore, una tensione di polarizzazione può essere presente sul filo del segnale da CPS. La tensione di polarizzazione è fornita dal PCM ed è usata come un aiuto per diagnosticare errori di circuito CPS e la riduzione del rumore (interferenza da componenti elettrici vicini).
Al fine di misurare la tensione di polarizzazione, collegare il PicoScope esattamente come già accennato Come eseguire il test (Figura 1) e seguire le Fasi da 1 a 5, seguite da:
6. Selezionare l’accoppiamento c.c. per canale A (vedere Figura 12).
7. Inserire l'accensione (non avviare o accendere il motore).
8. Far funzionare il software dell’oscilloscopio premendo la barra spaziatrice sulla tastiera o il pulsante Go sul dispositivo PicoScope.
9. Premere il pulsante Stop sul PicoScope per fermare la presa per attivare l'analisi della forma d'onda.

Figure 10
Sarà necessaria un'ispezione fisica del sistema CPS se la forma d'onda ottenuta indica un'area di preoccupazione. L'elenco che segue metterà in evidenza alcune aree chiave per l'ispezione.
AT017-3(IT)
Disclaimer
This help topic is subject to changes without notification. The information within is carefully checked and considered to be correct. This information is an example of our investigations and findings and is not a definitive procedure.
Pico Technology accepts no responsibility for inaccuracies. Each vehicle may be different and require unique test
settings.