PicoScope 7 Automotive
Available for Windows, Mac, and Linux, the next evolution of our diagnostic scope software is now available.
Automotive guided tests
Library of examples on how to perform tests when using PicoScope.

Training
Our collection of training videos, articles, guides and information on training courses.

Waveform library
The Waveform Library is a global database of waveforms uploaded by PicoScope users.

Case studies
Real-life case studies show how the professionals use PicoScope to diagnose vehicle faults.

A to Z of PicoScope
Detailed description of various PicoScope software and hardware features.

Videos
Training resources and demonstrations on PicoScope and the Automotive Diagnostics Kit.

Newsletter
Archive of our monthly Automotive Newsletters.

Documentation
Download manuals, brochures, posters, and training materials.

Reviews and awards
Accolades for the preferred diagnostic tool for service centers and vehicle manufacturers.


Ultrasonic parking sensor detector
*At Pico we are always looking to improve our products. The tool used in this guided test may have been superseded and the product above is our latest version used to diagnose the fault documented in this case study.
The purpose of this test is to evaluate the operation of ultrasonic proximity sensors (referred to as parking sensors) using an Ultrasonic parking sensor detector.
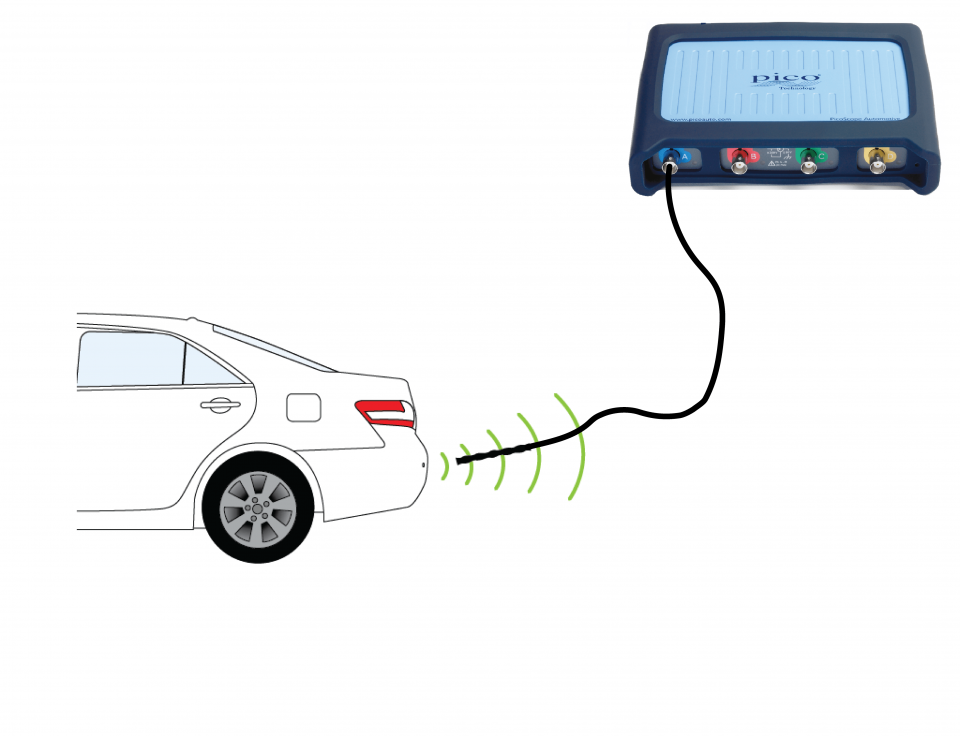
View connection guidance notes.
Notes
You may need to have the transmission in reverse or a forward gear with the engine running (and the clutch disengaged) to activate the parking sensor system. If so, a qualified driver must be in control of the vehicle at all times. Therefore, you will need two operatives, one to control the vehicle and one to take measurements, during testing of the parking sensor system.
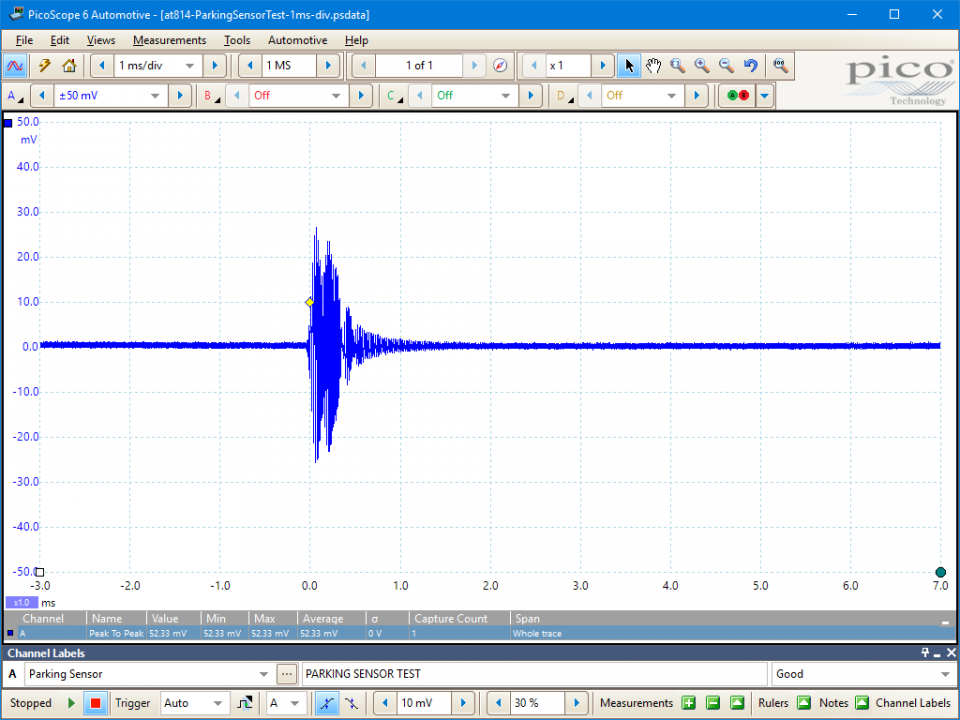
This known good waveform has the following characteristics:
A typical parking sensor can be considered as both a transmitter and a receiver. An internal piezoelectric device is utilised to not only generate a high-frequency pulse through the air but also to convert any reflected pulses to a voltage representation of distance.
The parking sensor is initially driven by the relevant onboard vehicle computer for sufficient time to excite the piezoelectric element at high frequency (around 40 kHz). This excitement results in a pressure pulse being emitted from the surface of the parking sensor. The pressure pulse produces an inaudible sound wave (it oscillates at a frequency beyond the range of human hearing).
The time taken to excite the parking sensor (computer controlled) is critical as the piezoelectric element is required to resonate at 40 kHz almost instantaneously, then return to rest and await any reflections. The return to rest takes time; this decay time is referred to as ringing and represents the dissipation of the sound energy generated by the piezoelectric element.
During the ringing, the onboard computer will pause before listening to any reflections received by the parking sensor. Otherwise, the ringing could interfere and disguise any reflected pressure waves.
When the sound waves leave the surface of the parking sensor, the time taken for the piezoelectric element to receive any reflected sound waves determines the distance between the parking sensor and reflecting object.
The correct operation of parking sensors is dependent upon their position/orientation (aftermarket fitment), wiring harness connectivity, surface contamination or degradation, control unit functionality, and their operational environment being removed from sources of intense telecommunication and ultrasonic activity.
Whilst holding the Ultrasonic parking sensor detector at the same distance and location from each of the vehicle’s parking sensors in turn, compare the amplitudes of measured pulses to identify inoperative sensors or those that are producing a diminished output.
GT814-EN
Disclaimer
This help topic is subject to changes without notification. The information within is carefully checked and considered to be correct. This information is an example of our investigations and findings and is not a definitive procedure.
Pico Technology accepts no responsibility for inaccuracies. Each vehicle may be different and require unique test
settings.
We know that our PicoScope users are clever and creative and we’d love to receive your ideas for improvement on this test. Click the Add comment button to leave your feedback.
Pico Mike
January 04 2019
Hi Cedric,
I have passed your query to a member of the Automotive Support team. Someone should be in touch with you shortly.
Cedric Wicks
January 03 2019
I would like to be able to measure the time for the piezoelectric element to receive any reflected sound waves and determine the distance between the parking sensor and reflecting object…do you have products that can do that?
Chad
May 15 2017
First up, it’s great to see new guided tests coming online, thank you.
Can you provide a comparison with the signal with from the ECU comparing input to output as this test will only tell you that the sensor doesn’t work and not why?
Also, example waveforms from faulty sensors for comparison.














