PicoScope 7 Automotive
Available for Windows, Mac, and Linux, the next evolution of our diagnostic scope software is now available.
Automotive guided tests
Library of examples on how to perform tests when using PicoScope.

Training
Our collection of training videos, articles, guides and information on training courses.

Waveform library
The Waveform Library is a global database of waveforms uploaded by PicoScope users.

Case studies
Real-life case studies show how the professionals use PicoScope to diagnose vehicle faults.

A to Z of PicoScope
Detailed description of various PicoScope software and hardware features.

Videos
Training resources and demonstrations on PicoScope and the Automotive Diagnostics Kit.

Newsletter
Archive of our monthly Automotive Newsletters.

Documentation
Download manuals, brochures, posters, and training materials.

Reviews and awards
Accolades for the preferred diagnostic tool for service centers and vehicle manufacturers.


Back-pinning Probe Set

Large Dolphin/Gator Clips
*At Pico we are always looking to improve our products. The tools used in this guided test may have been superseded and the products above are our latest versions used to diagnose the fault documented in this case study.
The purpose of this test is to examine the signals sent from the pedal position sensor to the Engine Control Module (ECM) relating to pedal position.

View connection guidance notes.
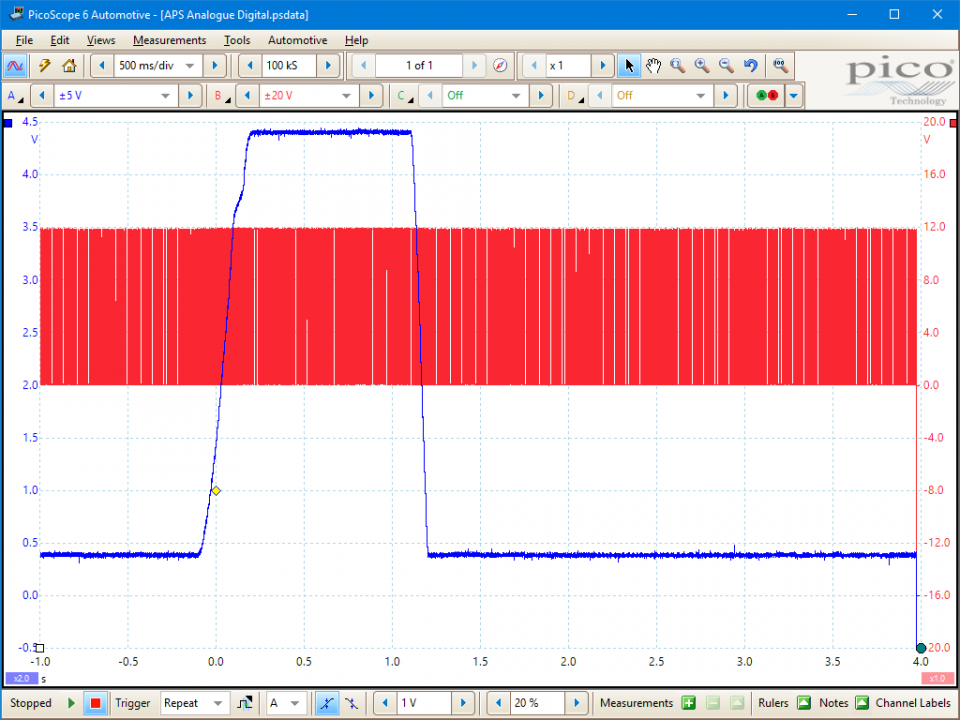
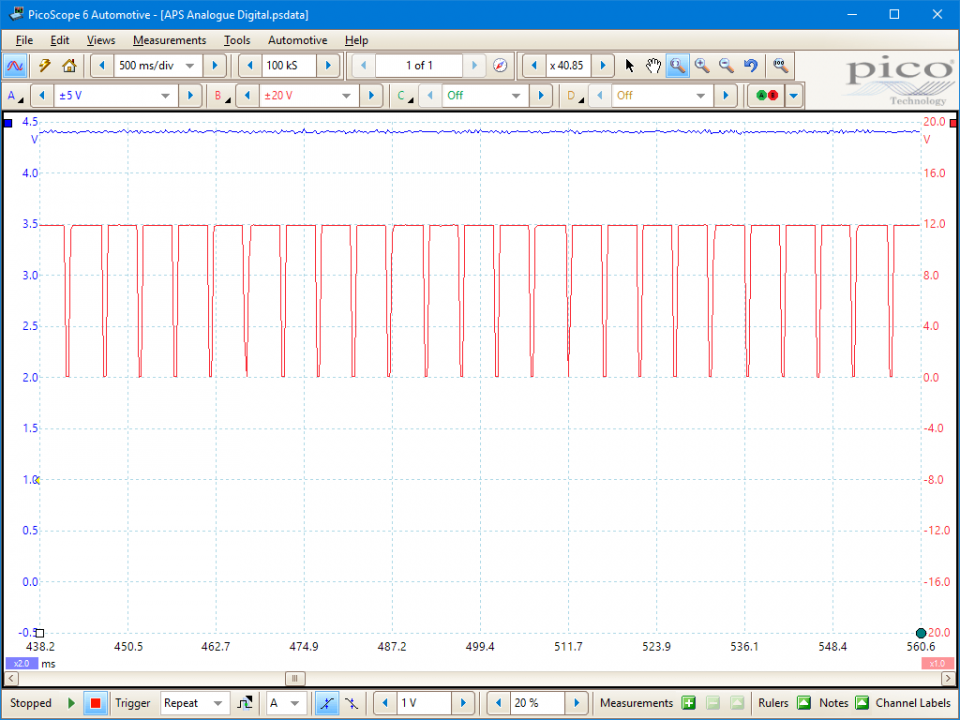
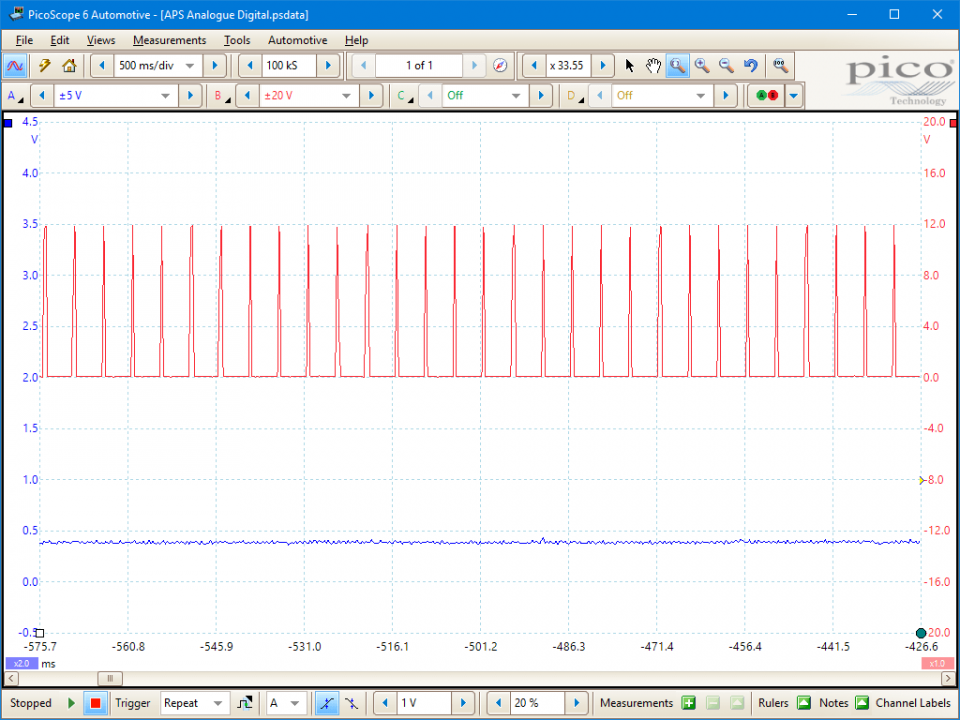

This analogue/digital APP sensor produces an analogue voltage (Channel A, blue trace) and a digital output (Channel B, red trace). The analogue voltage is simply proportional to the pedal position. The digital voltage is a sequence of approximately 12-volt pulses of varying width. The width of each pulse is proportional to the analogue voltage at that time, as shown in Figures 2a,b,c.
Go to the drop-down menu bar at the lower left corner of the Waveform Library window and select, Accelerator pedal position sensor (digital).


With the increasing level of electronic control and the subsequent decrease in moving mechanical parts it is inevitable that we will see more items being controlled in a "fly by wire manner".
One example of this is throttle control. The majority of vehicles currently being produced no longer use an accelerator cable but instead use an APP in conjunction with an electronic throttle control actuator (ETC) incorporating an electronic throttle motor and a throttle position sensor (TPS).
The APP is quite simply one or, more commonly, two potentiometers attached to the accelerator pedal. As the accelerator is depressed, a voltage signal is sent to the PCM relaying the actual position of the accelerator pedal and thus the driver's physical demand. As a result of this input, the PCM then generates an output to the relevant actuator; in this case the ETC. As previously mentioned, the APP commonly has two potentiometers. These are employed to act as a plausibility test and also to ensure a degree of failsafe operation.
Several methods are used to generate the signal. The great majority use the common 5 volt reference as is used throughout the engine management system. The two most common methods of signal generation are as follows: -
Potentiometer 1 generates a signal of 0.3 to 4.8 volts (red trace in figure 3) and potentiometer 2 generates a signal of 0.5 to 4.8 volts (blue trace in figure 3). With an accelerator pedal position of 45 degrees, potentiometer 1 may be outputting a signal of 2 volts and potentiometer 2 a signal of 3 volts, for example.
Potentiometer 1 generates a signal of 0.3 to 4.8 volts (red trace in Figure 4) and potentiometer 2 generates a signal of 4.8 to 0.3 volts (blue trace in figure 4). With an accelerator pedal position of 0 degrees, potentiometer 1 may output a signal of 0.5 volts and potentiometer 2 may output a signal of 4.5 volts.
Upon receiving signals in this manner the PCM is able to ensure that the information is correct; for example, if APP angle is 45 degrees, then potentiometer 1 outputs 2 volts and potentiometer 2 outputs 3 volts. If there is any deviation from this then the PCM detects a possible fault and logs a relevant fault code. If one potentiometer track should fail then once again the PCM is able to detect this and run in a failsafe or emergency mode, often raising the idle and limiting throttle operation and lighting the malfunction indicator lamp (MIL). The use of two potentiometers also enables the PCM to monitor the speed at which the accelerator is depressed and closed, the throttle position thus controlling fuelling accordingly.
.Example pin data
Tested from a Smart Forfour 1.1 petrol 2005 MY.
Hella component
6 pin connector
Pin 1= 2.5 V reference voltage (yellow/red)
Pin 2= 5.0 V reference voltage (yellow/green)
Pin 3= Signal voltage, approx 1 V closed throttle & 3.8V open throttle (grey)
Pin 4= 0 V ground (brown/white)
Pin 5= 0 V ground (brown)
Pin 6= Signal voltage, approx 0.5 V closed throttle & 1.8 V open throttle (pink/black)
All figures quoted are approximate and measured by back pinning with ignition on and the multiplug connected.
Selection of component related Diagnostic Trouble Codes (DTCs)
P0221Throttle Pos. Sensor -B- Circuit Range/Performance
P0222 Throttle Pos. Sensor -B- Circuit Low Input
P0223 Throttle Pos. Sensor -B- Circuit High Input
P0225 Throttle Pos. Sensor -C- Circuit Voltage supply
P0226 Throttle Pos. Sensor -C- Circuit Range/Performance
P0227 Throttle Pos. Sensor -C- Circuit Low Input
P0228 Throttle Pos. Sensor -C- Circuit Hight Input
P1545 Throttle Pos.Contr Malfunction
GT850
Disclaimer
This help topic is subject to changes without notification. The information within is carefully checked and considered to be correct. This information is an example of our investigations and findings and is not a definitive procedure.
Pico Technology accepts no responsibility for inaccuracies. Each vehicle may be different and require unique test
settings.
We know that our PicoScope users are clever and creative and we’d love to receive your ideas for improvement on this test. Click the Add comment button to leave your feedback.














