PicoScope 7 Automotive
Available for Windows, Mac, and Linux, the next evolution of our diagnostic scope software is now available.
Automotive guided tests
Library of examples on how to perform tests when using PicoScope.

Training
Our collection of training videos, articles, guides and information on training courses.

Waveform library
The Waveform Library is a global database of waveforms uploaded by PicoScope users.

Case studies
Real-life case studies show how the professionals use PicoScope to diagnose vehicle faults.

A to Z of PicoScope
Detailed description of various PicoScope software and hardware features.

Videos
Training resources and demonstrations on PicoScope and the Automotive Diagnostics Kit.

Newsletter
Archive of our monthly Automotive Newsletters.

Documentation
Download manuals, brochures, posters, and training materials.

Reviews and awards
Accolades for the preferred diagnostic tool for service centers and vehicle manufacturers.

Les références relatives à la bague de remontée ci-dessous concernent un certain nombre de composants éventuels :
|
|
|
L’objectif de ce test consiste à évaluer le fonctionnement d'un capteur de position de vilebrequin (CPS) de type inductif avec un circuit de retour par la terre (non isolé de la masse).
Remarque : Le fonctionnement correct du CPS flottant de type inductif dépend de l'intégrité de l'enroulement de bobine interne du CPS, du circuit du CPS, du montage du CPS par rapport au capteur d’allumage et de l’entrefer entre le CPS et la bague de remontée.
La procédure d’essai ci-dessous présume que les conditions mentionnées ci-dessus sont toutes correctes et que le CPS fonctionne correctement. Les éventuelles défaillances identifiées concernant le fonctionnement du CPS lors de la conduite de ces essais n'indiquent pas nécessairement une défaillance du CPS lui-même.
Le CPS présente des caractéristiques opérationnelles qui sont incohérentes en raison de défauts de circuit, d’interférences électromagnétiques, de défaillances mécaniques (anneau de remontée) ou d’erreurs de mesure/connexion. Les résultats obtenus sont donc les symptômes de troubles sous-jacents et ne découlent pas d'un CPS défectueux. Il est donc primordial d'effectuer un contrôle de base de tous les éléments ci-dessus avant de prendre les mesures pour éviter un diagnostic erroné du CPS.
Toutes les lectures numériques indiquées dans cette rubrique d'aide sont standards et ne s’appliquent pas à tous les types de moteurs.
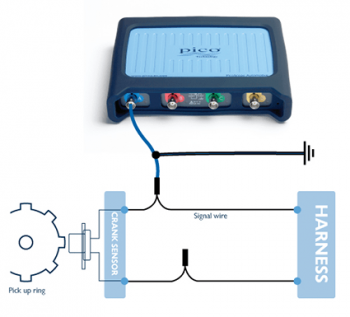
Figure 1 - Scope connections
|
Accessoires |
Paramètres du PicoScope
|
À l’aide du schéma de câblage du véhicule, identifiez le câble de signal du CPS.
Le CPS de type inductif utilise généralement deux câbles, l'un transportant le signal en cours de fonctionnement du moteur et l'autre, de zéro volt.

Figure 2 - Example waveform
Toutes les valeurs présentées dans l’exemple de formes d'ondes sont standards et non spécifiques à tous les types de véhicules.
Canal A. La Figure 2 indique la sortie de tension CA principale du CPS lorsque le moteur tourne au ralenti.
Consultez les données techniques sur le véhicule pour connaître les conditions et les résultats de test spécifiques.
Valeurs types
Ralenti du moteur : 650 à 850 tr/min environ
①
La règle du signal à zéro volt doit traverser le centre de la forme d'onde du CPS.
②
Indique les dents manquantes de la bague de remontée du CPS, qui est souvent confondu avec le FPC (consultez les notes de diagnostic ci-dessous).
③
L'amplitude minimale de la tension du signal de sortie du CPS due à la réduction de la vitesse du moteur suite à la course de compression (consultez la section Informations complémentaires ci-dessous).
④
L'amplitude maximale de la tension du signal de sortie du CPS due à l’augmentation de la vitesse du moteur suite à la course de combustion (consultez la section Informations complémentaires ci-dessous).
⑤
Les échelles de temps et de rotation indiquent une révolution du vilebrequin entre les dents manquantes de l'anneau d’angle de contact. La Figure 2 confirme 34 dents dans une révolution du vilebrequin avec deux dents manquantes, indiquant la position du vilebrequin.
⑥
Indique la vitesse du moteur en fonction de la position des règles de temps ⑤. Les règles de temps mis au niveau des dents manquantes subséquentes de la bague de remontée permettent à PicoScope de calculer la fréquence de 1 cycle complet (révolution) du vilebrequin. La fréquence et, qui plus est, le régime moteur, sont alors tous deux affichés au niveau du point ⑥.
Le CPS doit être considéré comme l'un des composants fondamentaux du système moderne de gestion du moteur. Malgré sa construction remarquablement simple, le fonctionnement approprié du CPS est primordial pour assurer un fonctionnement efficace du moteur. Afin d’apprécier pleinement le rôle que joue le CPS inductif, il faut comprendre le principe de fonctionnement derrière la tension ca générée par ce composant essentiel. Une fois que nous comprenons comment ce composant fonctionne, nous pouvons évaluer la cause des erreurs éventuelles dans notre forme d'onde.
Le CPS inductif comprend deux éléments essentiels : une bobine de fil enroulée sur un aimant permanent.

Figure 3 - CPS Operating principle
Chaque extrémité de la bobine de fil se termine au niveau du module de gestion de la puissance lorsque la tension de courant ca du signal de sortie générée est utilisée par le module de gestion de la puissance pour indiquer la vitesse et la position du vilebrequin, tandis que le reste du fil de bobine (-) est raccordé à une référence de terre (consultez la Figure 3).
L'aimant permanent contenu dans le CPS produit naturellement un champ magnétique autour des enroulements de bobine. Si un objet métallique est introduit dans ce champ magnétique (sous la forme de notre bague de remontée), l'intensité du champ magnétique varie, et elle augmente ou diminue selon la vitesse et le sens de déplacement de la bague de remontée (consultez la Figure 4). La variation du champ magnétique a l'effet désiré d'induire une tension de courant ca dans l'enroulement de la bobine, que le module de gestion de la puissance peut utiliser pour indiquer la vitesse et la position du moteur.
N.B. : seule la variation du champ magnétique induit une tension de courant ca dans les enroulements de la bobine. Si la bague de remontée s’arrête, aucune tension n’est générée, quelle que soit la position de la bague de remontée par rapport au CPS.

Figure 4

Figure 5
La forme d'onde du CPS comprend une perte de signal où la bague de remontée comporte un écart délibéré (dent(s) manquante(s)) dans l’intervalle régulier entre les dents (consultez les Figures 5 et 2).
Le module de gestion de la puissance utilise cette perte de signal pour identifier la position du vilebrequin, qui peut ou non se référer au TDC. Les fabricants utilisent les dents manquantes de la bague de remontée pour indiquer une variété de positions du vilebrequin. Par ex. : pistons alignés (position sécurisée du moteur), TDC, le nbre de degrés avant TDC, ou encore, ils peuvent choisir une combinaison de dents manquantes à des intervalles de 90 degrés. Pour une évaluation précise du signal de référence de la position du vilebrequin, consultez le manuel de réparation concerné.
Le calcul de la vitesse du vilebrequin dépend de la fréquence du signal de sortie ca depuis le CPS. Quand la vitesse du vilebrequin augmente, la hausse de la fréquence du signal de sortie du CPS est directement proportionnelle. L'amplitude du signal augmente également avec une vitesse de moteur, à plus de 20 V ca avec des vitesses de moteur supérieures (consultez la Figure 6).

Figure 6
La hausse et la réduction de la fréquence/l’amplitude sont présentées dans la Figure 2, où la charge exercée sur le vilebrequin pendant la course de compression entraîne une réduction momentanée de vitesse du vilebrequin ③. Ici, nous observons une diminution de la fréquence et une chute de l'amplitude, en contradiction directe par rapport au point ④ où la vitesse du vilebrequin augmente momentanément juste après la compression du TDC (course de combustion), entraînant une hausse de la fréquence et de l'amplitude.
Le PCM utilise ces caractéristiques de signal pour indiquer l'accélération et la décélération du vilebrequin après chaque événement de combustion afin de déceler les ratés ou une mauvaise contribution du cylindre (équilibre de cylindre). En présumant que tous les événements de compression et de combustion du moteur sont égaux, nous devrions obtenir une hausse et une chute uniformes du signal du CPS à des vitesses de moteur constantes.
Il est possible de calculer la vitesse du moteur à partir du signal du CPS en plaçant les règles de temps à chaque point consécutif de perte de signal mesuré (dent(s) manquante(s)) ; consultez la Figure 2 ②.
La grande majorité des bagues de remontée contiennent 36 ou 60 dents avec 1 ou 2 dents manquantes en un point unique de leur circonférence. Le positionnement des règles de temps directement aux points de perte de signal permet d’indiquer 1 tour de vilebrequin. Dans l’exemple de forme d’onde ci-dessus, il y a 34 dents entre les règles de temps, ce qui indique donc une bague de remontée avec 34 dents autour de la circonférence, avec 2 dents manquantes pour la référence de position du moteur (36 dents − 2 dents = 1 révolution du vilebrequin).
Le positionnement d’une règle de temps en des points consécutifs de perte de signal dans la forme d'onde permet à PicoScope de calculer la vitesse du moteur en fonction de la fréquence du vilebrequin (cycles par seconde).
Dans la Figure 2, chaque règle de temps est positionnée au point des dents manquantes ② (une révolution du vilebrequin) où la fréquence entre les règles de temps est calculée à 11,63 Hz dans la légende de fréquence ⑥.
Afin de convertir la fréquence en tr/min, on multiplie simplement 11,63 Hz par 60 pour obtenir 697,7 tr/min. La fréquence et la valeur en tr/min du vilebrequin sont affichées dans la légende de fréquence ⑥.
Capteur de position du vilebrequin installé et débranché des câblages du véhicule
La valeur de la résistance de la bobine de fil enroulée autour de l'aimant permanent donne une indication de l'intégrité du CPS et elle est essentielle pour obtenir une tension/un signal de sortie correct. Des valeurs de résistance incorrectes ou un court-circuit à la masse du véhicule se traduisent par une défaillance du signal de sortie.
Comme les valeurs types de la résistance de la bobine de fil du CPS varient selon les fabricants, référez-vous au manuel de réparation pour les spécifications correctes.
Afin de tester la valeur de la résistance du CPS, débranchez le capteur du câblage du véhicule et raccordez un ohmmètre, comme l’illustre la Figure 7 ci-dessous :

Figure 7

Figure 8
Bien que la résistance du CPS figure éventuellement dans les spécifications, il est également possible de contrôler très rapidement la présence éventuelle d’un court-circuit à la masse en même temps que le contrôle de la résistance. La figure 8 indique comment l'ohmmètre est raccordé pour confirmer l’absence de court-circuit à la masse du véhicule. Une valeur supérieure à 10 kOhms suffit pour confirmer l’absence de court-circuit (une valeur de résistance infinie ou de circuit ouvert est souhaitable).
Capteur de position du vilebrequin installé et raccordé aux câblages du véhicule
Selon les fabricants, une tension de polarisation peut être présente sur l’un ou l’autre câble du CPS. La tension de polarisation est fournie par le module de gestion de la puissance et utilisée pour aider à diagnostiquer les erreurs de circuit du CPS et les réductions du bruit (interférences provenant de composantes électriques voisines).
Afin de mesurer la tension de polarisation, raccordez PicoScope exactement comme indiqué ci-dessus, dans la section Comment effectuer le test (Figure 1), et suivez les étapes 1 à 5, puis :
Sélectionnez le couplage CC pour le canal A et réduire la gamme de tension de ± 5 V (consultez la Figure 9).
Mettez le contact (ne pas lancer ou démarrer le moteur).
Démarrez le logiciel de votre oscilloscope en appuyant sur la barre d’espace de votre clavier ou sur le bouton Aller dans PicoScope.
Appuyez sur le bouton Stop dans PicoScope pour arrêter la prise de mesure et permettre une analyse des formes d’ondes.

Figure 9
Un contrôle physique du CPS sera nécessaire si la forme d’onde obtenue présente un élément inquiétant. La liste ci-dessous met en évidence certains éléments clés à contrôler.
AT430-1(FR)
Disclaimer
This help topic is subject to changes without notification. The information within is carefully checked and considered to be correct. This information is an example of our investigations and findings and is not a definitive procedure.
Pico Technology accepts no responsibility for inaccuracies. Each vehicle may be different and require unique test
settings.














