PicoScope 7 Automotive
Available for Windows, Mac, and Linux, the next evolution of our diagnostic scope software is now available.
Automotive guided tests
Library of examples on how to perform tests when using PicoScope.

Training
Our collection of training videos, articles, guides and information on training courses.

Waveform library
The Waveform Library is a global database of waveforms uploaded by PicoScope users.

Case studies
Real-life case studies show how the professionals use PicoScope to diagnose vehicle faults.

A to Z of PicoScope
Detailed description of various PicoScope software and hardware features.

Videos
Training resources and demonstrations on PicoScope and the Automotive Diagnostics Kit.

Newsletter
Archive of our monthly Automotive Newsletters.

Documentation
Download manuals, brochures, posters, and training materials.

Reviews and awards
Accolades for the preferred diagnostic tool for service centers and vehicle manufacturers.

Conecte un terminal de pruebas BNC al Canal A del osciloscopio. Coloque una pinza de cocodrilo negra pequeña en el cable con el recubrimiento negro (negativo) y una punta de sujeción en el extremo con el recubrimiento rojo (positivo). Coloque la pinza de cocodrilo negra pequeña en el armazón de la motocicleta o el negativo de la batería como se muestra en la figura 1. Compruebe los datos de pins del fabricante para saber cuál es el terminal de conexión del sensor de velocidad de carretera del módulo de control electrónico (ECM) de la inyección de combustible. Toque el pin correcto del multiconector con la punta de acupuntura como se indica en la figura 2. Asegúrese de que se establece una buena conexión a través del cable o terminal y de que la punta haya atravesado el cable y el aislamiento del terminal.
Con el ejemplo de forma de onda que se muestra en pantalla, ahora puede pulsar la barra espaciadora para empezar a ver lecturas reales.
Nota: se deben extremar las precauciones durante las pruebas del sensor de velocidad de carretera. Nuestra prueba se llevó a cabo con la moto sobre el caballete central; se introdujo la primera marcha, soltando lentamente el embrague e incrementando el accionamiento de la rueda posterior hasta un máximo de 20 mph. Si la moto no tiene caballete central, debe utilizarse un paddock de elevación con las argollas de fijación correctas. No se debe intentar capturar datos en directo mientras se está montando en la motocicleta.

La forma de onda que se muestra en la ilustración anterior muestra una forma de onda típica de efecto Hall con el voltaje conmutando de cero a 8 voltios. A medida que aumenta la velocidad de carretera, la tensión de base a pico se mantiene igual, pero hay un aumento de frecuencia. La conmutación de tensión puede ser distinta de un fabricante a otro, pero la tensión no es tan importante como la frecuencia producida.

El módulo de control electrónico (ECM) tiene la habilidad de ajustar la velocidad de ralentí del motor (si procede) cuando el piloto está desacelerando o está quieto, utilizando la información del sensor de velocidad de carretera (RSS) de la moto.
El sensor es un dispositivo de 3 cables y tiene un suministro de tensión de la batería, una toma de tierra y una tensión de conmutación de onda cuadrada digital. Esta tensión de conmutación varía de un fabricante a otro.
Tras realizar la conexión eléctrica adecuada a la salida del RSS, levante la rueda trasera utilizando el caballete central. Si la motocicleta no incorpora un caballete central, debe utilizarse un soporte «paddock». Arranque el motor y seleccione una marcha; debería verse una conmutación de forma de onda a un voltaje mayor. El voltaje que se observa variará de un fabricante a otro.
A medida que aumenta la velocidad de carretera, se debería ver como aumenta la frecuencia de la conmutación. Este cambio también puede medirse en un multímetro con función de frecuencia. En muchas ocasiones, el sensor se encuentra junto al piñón delantero de la cadena de transmisión. Si la moto cuenta con una un eje motriz, el sensor se encontrará en una posición similar.
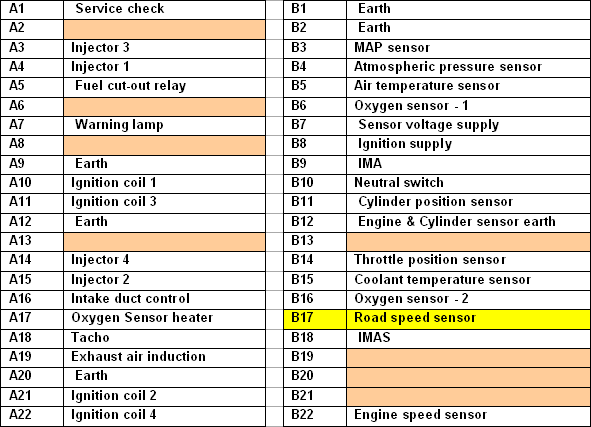
Nuestro vehículo de pruebas fue una motocicleta Honda. Abajo se incluyen los datos de pins del multiconector del ECM. Los datos de los pins son específicos a cada modelo y fabricante, por lo que solo se muestran a modo de ejemplo.
Con la mayoría de los sensores de velocidad de carretera para motos tienen salida digital, la onda cuadrada observada debería tener una conmutación limpia, tener un aspecto uniforme e incrementar la frecuencia a medida que aumenta la velocidad de carretera. En la ilustración anterior, se muestran dos señales falsas. No es más que los impulsos de alta tensión del motor, que interfieren con la forma de onda. Esto no debería ser motivo de preocupación.
AT108-2(ES)
Disclaimer
This help topic is subject to changes without notification. The information within is carefully checked and considered to be correct. This information is an example of our investigations and findings and is not a definitive procedure.
Pico Technology accepts no responsibility for inaccuracies. Each vehicle may be different and require unique test
settings.
















