PicoScope 7 Automotive
Available for Windows, Mac, and Linux, the next evolution of our diagnostic scope software is now available.
Automotive guided tests
Library of examples on how to perform tests when using PicoScope.

Training
Our collection of training videos, articles, guides and information on training courses.

Waveform library
The Waveform Library is a global database of waveforms uploaded by PicoScope users.

Case studies
Real-life case studies show how the professionals use PicoScope to diagnose vehicle faults.

A to Z of PicoScope
Detailed description of various PicoScope software and hardware features.

Videos
Training resources and demonstrations on PicoScope and the Automotive Diagnostics Kit.

Newsletter
Archive of our monthly Automotive Newsletters.

Documentation
Download manuals, brochures, posters, and training materials.

Reviews and awards
Accolades for the preferred diagnostic tool for service centers and vehicle manufacturers.

Las referencias del aro de captación que se muestran a continuación están relacionadas con varios componentes posibles:
|
|
|
El propósito de esta prueba es evaluar el funcionamiento de un sensor de posición del cigüeñal (CPS) sin conexión a tierra, normalmente conocido como CPS flotante.
Nota: El correcto funcionamiento del CPS flotante de estilo inductivo depende de la integridad de las bobinas internas del CPS, del circuito del CPS, de la instalación del CPS en relación a la captación y del hueco entre el CPS y el aro de captación.
El procedimiento de pruebas siguiente asume que todas las condiciones mencionadas anteriormente están en orden y que el CPS funciona correctamente. Cualquier fallo identificados en el funcionamiento del CPS mientras se llevan a cabo estas pruebas no indica necesariamente que haya un defecto en el CPS.
El CPS mostrará las características operativas que son incompatibles debido a fallos del circuito, a una interferencia electromagnética, a fallos mecánicos (aro de captación) o a errores de medición/conexión. Los resultados obtenidos son, por lo tanto, síntomas de condiciones subyacentes, y no son consecuencia de un CPS defectuoso. Por lo tanto, es de suma importancia llevar a cabo una inspección básica de todos los elementos anteriores antes de tomar las medidas para evitar un diagnóstico incorrecto del CPS.
Todas las lecturas numéricas indicadas en este tema de ayuda son generales y no son aplicables a todos los tipos de motor.
|
Accesorios |
Ajustes de PicoScope
|
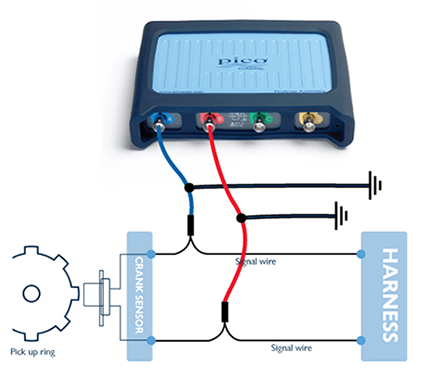
El CPS flotante de tipo inductivo utilizará generalmente 2 cables, ambos con imágenes en espejo de la señal de velocidad del cigüeñal, y suelen están protegidos por un cable a tierra externo de estilo coaxial.
Para obtener los resultados de pruebas correctos es vital establecer la orientación correcta de cada forma de onda (ver Diagnóstico):

Figure 2 - Example waveform
Todos los valores incluidos en los ejemplos de formas de onda son generales y no son específicos para todo tipo de vehículos.
Nota: la señal está presente en ambos cables del CPS.
Canal A. La figura 2 indica la principal salida de tensión de CA del CPS con el motor en marcha a velocidad de ralentí. Canal B. Indica la salida de tensión de CA de la señal secundaria (imagen en espejo del Canal A.
Consulte los datos técnicos del vehículo para ver condiciones y resultados de pruebas específicas.
Valores típicos
Motor al ralentí (650-800 rpm)
① Debería pasar por el centro de la forma de onda del CPS la regla de la señal a cero voltios.
② Indica los dientes que faltan en el aro de captación del CPS, que suele confundirse con el TDC. Observe que la orientación de la forma de onda es diferente entre el Canal A y el Canal B(consulte las Notas de diagnóstico a continuación).
③ Amplitud mínima de la tensión de la señal de salida del CPS debido a una reducción de la velocidad del motor como resultado de la carrera de compresión (ver Más información abajo).
④ Amplitud máxima de la tensión de la señal de salida del CPS debido a un aumento de la velocidad del motor como resultado de la carrera de alimentación (ver Más información abajo).
⑤ Las reglas de tiempo y rotación indican una revolución del cigüeñal entre los dientes que faltan del anillo de captación. La forma de onda del ejemplo confirma 35 dientes en una revolución del cigüeñal, con un diente que falta y que indica la posición del cigüeñal.
⑥ Indica la velocidad del motor basada en la posición de las reglas de tiempo ⑤. Las reglas de tiempo colocadas en dientes contiguos retirados en el aro de captación permiten al PicoScope calcular la frecuencia de 1 ciclo completo (revolución) del cigüeñal. Así es como se muestra la frecuencia y, lo más importante, las RPM en el punto ⑥.
El PCM utiliza la señal de ambos cables flotantes del CPS con el fin de determinar la posición y la velocidad del cigüeñal. Ninguno de los cables está conectado a tierra (de ahí el término flotante) y, por lo tanto, ambos llevan una imagen en espejo de la tensión de CA generada por el CPS. El PCM requiere la orientación correcta de la señal del cable correspondiente para identificar la posición y velocidad del motor.
El Canal A indica la orientación correcta de una señal típica del CPS y se considera la entrada de señal principal o primaria, mientras que al Canal B se le conoce aquí la entrada de señal secundaria. Ambas entradas son fundamentalmente idénticas entre sí, pero su orientación debe ser la correcta para el cable correspondiente del CPS.
Consulte siempre en el manual de taller del fabricante las referencias de los números de pins del PCM y CPS, para asegurarse de que la orientación correcta de la señal del CPS sea correcta y llegue al PCM en el cable correcto.
Para identificar las señales principal y secundaria, observe la figura 3:

Figure 3 - Main and sub-signals
Como estamos midiendo individualmente cada cable de señal flotante del CPS con respecto a nuestra toma de tierra del terminal de pruebas, no podemos medir la verdadera amplitud de la señal del CPS. En la mayoría de las aplicaciones esto no es relevante para la orientación y las inspecciones de sincronización/correlación pero, si se sospecha de la amplitud real, podemos aplicar un canal matemático (Canal A − Canal B) para revelar la verdadera amplitud basada en la tensión diferencial de las señales principal y secundaria. Consulte la figura 4.
Para mostrar el canal matemáticoA-B integrado en las señales capturadas del CPS, seleccione: Herramientas > Canales matemáticos > active la casilla junto a A-B y seleccione Aceptar. Aparecerá un tercer canal matemático que muestra la verdadera amplitud del CPS flotante.

Figure 4 - A-B Maths Channel and True amplitude
El PCM calculará la tensión diferencial derivada de las señales principal y secundaria presentes en ambos cables del CPS. Al utilizar el canal matemático (A-B), el osciloscopio puede revelar la amplitud verdadera del CPS tal y como la utiliza el PCM para identificar la posición y la velocidad del motor.
El CPS es, hoy en día, uno de los componentes fundamentales del sistema de gestión del motor. Aunque su diseño es maravillosamente simple, el correcto funcionamiento del CPS es fundamental para un eficiente funcionamiento del motor. Para poder apreciar completamente el papel desempeñado por el CPS inductivo, debemos comprender el principio operativo detrás de la tensión de CA generada por un componente tan crítico. Cuando entendamos cómo funciona este componente, podremos evaluar la causa de cualquier error en nuestra forma de onda.
El CPS inductivo consta de dos componentes esenciales: una bobina de cable enrollada alrededor de un imán permanente.

Figure 5 - CPS Operating principle
Cada extremo de la bobina termina en el PCM, donde este utiliza la tensión de la señal de salida de CA generada (presente en ambos cables) para indicar la velocidad y la posición del cigüeñal (ver figura 5).
El imán permanente incorporado en el CPS creará, evidentemente, un campo magnético alrededor de las bobinas. Si se introduce un objeto metálico en este campo magnético (como nuestro aro de captación), la intensidad del campo magnético variará, aumentando o reduciéndose dependiendo de la velocidad y la dirección del recorrido del aro de captación (ver figura 6). La variación en el campo magnético tiene el efecto deseado de inducir una tensión de CA en la bobina, que el PCM puede utilizar para denotar la posición y velocidad del motor.
Nota: la variación en el campo magnético es el único factor responsable de inducir una tensión de CA en la bobina. Si el aro de captación se detiene, no se genera tensión independientemente de la posición del aro de captación en relación con el CPS.

Figure 6

Figure 8
La forma de onda del CPS incluirá a una retirada de la señal donde el aro de captación tiene un hueco intencionado (falta un diente o dientes) en el espacio uniforme entre los dientes (ver figura 7 y figura 3).
El PCM utilizará esta retirada de la señal para identificar la posición del cigüeñal, que podría hacer o no referencia al TDC. Los fabricantes utilizarán los dientes que faltan en el aro de captación para indicar una variedad de posiciones del cigüeñal. P. ej., pistones en línea, (posición segura de motor) TDC, el nº de grados antes del TDC, o podrían elegir una combinación de dientes eliminados a intervalos de 90 grados. Para una evaluación precisa de la señal de referencia de la posición del cigüeñal, consulte el manual del taller correspondiente.
El cálculo de la velocidad del cigüeñal se basa en la frecuencia de la señal de salida de CA del CPS. A medida que aumenta la velocidad del cigüeñal, aumentará también la frecuencia de la señal de salida del CPS en una proporción directa. La amplitud de la señal también aumentará con la velocidad del motor por encima de 20 V de CA a altas velocidades del motor (ver figura 8).
La subida y la caída en la frecuencia/amplitud pueden verse en la figura 2, donde la carga colocada sobre el cigüeñal durante la carrera de compresión produce una reducción momentánea en la velocidad del cigüeñal ③. Aquí podemos ver una disminución de frecuencia y una caída de la amplitud en contraste directo con ④, donde el cigüeñal aumentará momentáneamente su velocidad justo después de la compresión del TDC (carrera de alimentación), generando un aumento de la frecuencia y de la amplitud.
El PCM utilizará estas características de la señal para indicar la aceleración y desaceleración del cigüeñal después de cada evento de combustión, con el fin de detectar fallos de disparo o contribución pobre del cilindro (equilibrio del cilindro). Suponiendo que todos los eventos de compresión y combustión del motor son iguales, deberíamos obtener una subida y caída uniformes en la señal del CPS, a velocidades de motor constantes.
La velocidad del motor se puede calcular a partir de la señal del CPS, colocando las reglas de tiempo en los puntos de retirada consecutivos de la señal capturada (diente/dientes que faltan). Ver figura 2 ②.
La gran mayoría de aros de captación constarán de 36 o 60 dientes con 1 o 2 dientes retirados en un único punto de su circunferencia. Colocar las reglas de tiempo directamente en los puntos de retirada, indicará 1 revolución del cigüeñal. En el ejemplo de forma de onda anteriores tenemos 35 dientes entre las reglas de tiempo, indicando un aro de captación de 35 dientes alrededor de la circunferencia con 1 diente retirado para la referencia de posición del motor (36 dientes - 1 diente = 1 x revolución del cigüeñal).
Al colocar una regla de tiempo en puntos de retirada consecutivos dentro de la forma de onda, PicoScope podrá calcular la velocidad del motor basada en la frecuencia del cigüeñal (ciclos por segundo).
En la figura 2, cada regla de tiempo se coloca en puntos donde hay dientes retirados ② (una revolución del cigüeñal), donde se calcula la frecuencia entre las reglas de tiempo a 13,45 Hz en la leyenda de frecuencia ⑥.
Para convertir la frecuencia a RPM, simplemente tenemos que multiplicar 13,45 Hz por 60 para obtener 807 RPM. Tanto la frecuencia como el valor de RPM del cigüeñal se muestran en la leyenda de frecuencia ⑥.
Sensor de posición del cigüeñal instalado y desconectado del juego de cables del vehículo
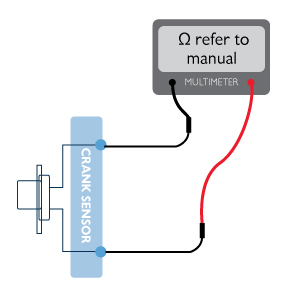
El valor de la resistencia de la bobina enrollada alrededor del imán permanente proporciona una indicación de la integridad del CPS y es esencial para la correcta señal/tensión de salida. Unos valores de resistencia incorrectos o un cortocircuito a tierra del vehículo provocarán un fallo en la señal de salida.
Los valores típicos de la resistencia de la bobina del CPS varían de un fabricante a otro; consulte el manual del taller correspondiente para ver las especificaciones correctas.
Para probar el valor de la resistencia del CPS, desconecte el sensor del juego de cables del vehículo y conecte un ohmímetro como se muestra en la figura 9 siguiente:
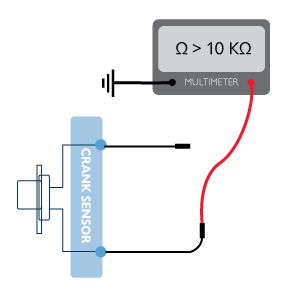
Mientras que la resistencia CPS puede estar en las especificaciones, se puede realizar una comprobación de cortocircuito a tierra al mismo tiempo que se lleva a cabo la comprobación de resistencia. La figura 10 indica cómo se conecta el ohmímetro para confirmar que no hay ningún cortocircuito a tierra del vehículo. Un valor superior a 10 kohmios es suficiente para confirmar que no hay ningún cortocircuito (lo ideal es obtener un valor de resistencia infinita o circuito abierto).
Sensor de posición del cigüeñal instalado y conectado al juego de cables del vehículo
Dependiendo del fabricante, podría haber una tensión de polarización en cualquiera de los cables del CPS. Esta tensión de polarización la proporciona el PCM y se utiliza como ayuda para diagnosticar errores del circuito del CPS y para la reducción de ruido (interferencia de componentes eléctricos vecinos).
Para medir la tensión de polarización, conecte el PicoScope exactamente cómo se ha indicado anteriormente en Cómo realizar la prueba (Figura 1), siga los pasos 1 a 7 y después:
8. Seleccione el acoplamiento de CC para el Canal A y el Canal B y reduzca el rango de tensión a ± 5 V (ver figura 11).
9. Encienda el contacto (no arranque el motor).
10. Pulse el botón Parar del PicoScope para detener la captura y activar el análisis de la forma de onda.

Figure 11
Localización de problemas (pruebas mecánicas)
Si la forma de onda obtenida indica la existencia de un área de preocupación, será necesario realizar una inspección física del CPS. La siguiente lista destaca algunas áreas claves para la inspección.
AT429-1(ES)
Disclaimer
This help topic is subject to changes without notification. The information within is carefully checked and considered to be correct. This information is an example of our investigations and findings and is not a definitive procedure.
Pico Technology accepts no responsibility for inaccuracies. Each vehicle may be different and require unique test
settings.