PicoScope 7 Automotive
Available for Windows, Mac, and Linux, the next evolution of our diagnostic scope software is now available.
Automotive guided tests
Library of examples on how to perform tests when using PicoScope.

Training
Our collection of training videos, articles, guides and information on training courses.

Waveform library
The Waveform Library is a global database of waveforms uploaded by PicoScope users.

Case studies
Real-life case studies show how the professionals use PicoScope to diagnose vehicle faults.

A to Z of PicoScope
Detailed description of various PicoScope software and hardware features.

Videos
Training resources and demonstrations on PicoScope and the Automotive Diagnostics Kit.

Newsletter
Archive of our monthly Automotive Newsletters.

Documentation
Download manuals, brochures, posters, and training materials.

Reviews and awards
Accolades for the preferred diagnostic tool for service centers and vehicle manufacturers.

Mit diesem Test kann referenzierte abgegebene Induktionsspannung eines Kurbelwellenpositionssensors (CKP) bei laufendem Motor bewertet werden.

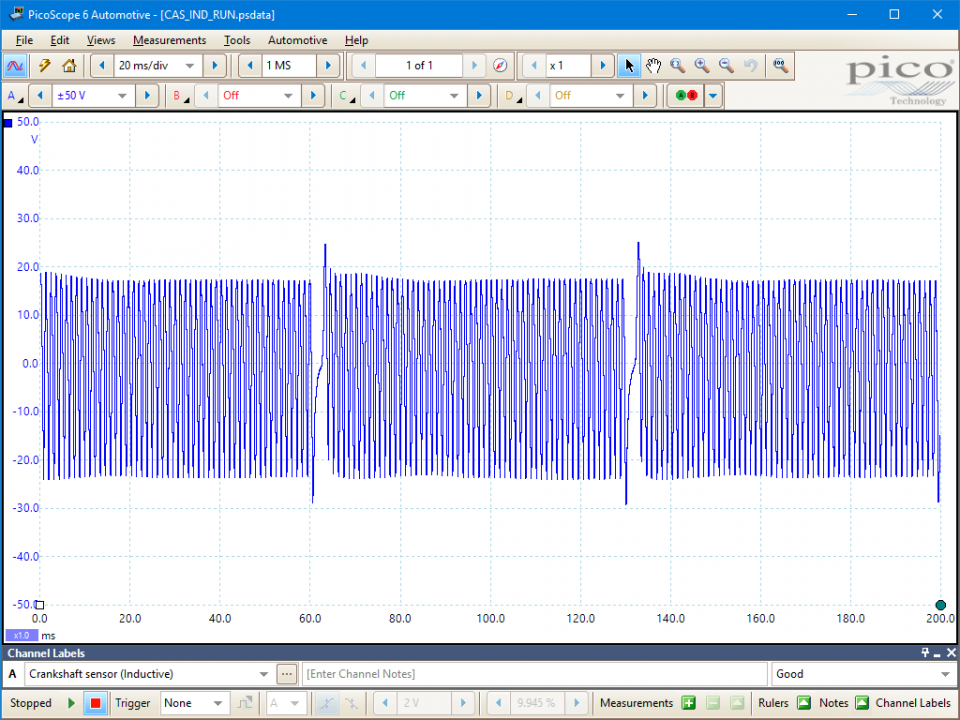
Diese bekanntermaßen gute Wellenform hat die folgenden Kennwerte:
Es sind kein übermäßiges Rauschen und keine inkonsistenten Unterbrechungen der Wellenform vorhanden.
Bei steigender Motorendrehzahl erhöhen sich Amplitude und Frequenz.
Die Schwingungen werden durch eine von der Referenzmarkierung für die Steuerung verursachte Lücke unterbrochen, die eine feste Position bei der Kurbelwellenumdrehung kennzeichnet.
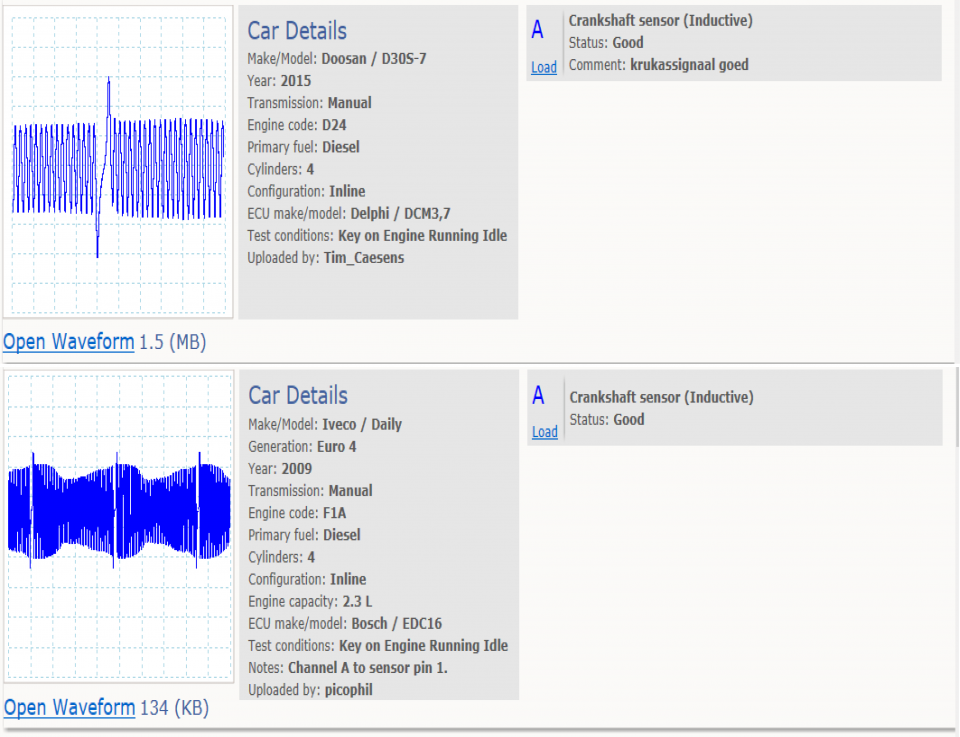
Gehen Sie zur Dropdown-Menüleiste in der linken unteren Ecke des Fensters Waveform Library und wählen Sie Kurbelwellensensor (induktiv) aus.


Ein induktiver Kurbelwellenpositionssensor (CKP) liefert dem Motorsteuerungsmodul (ECM) das primäre Referenzsignal für die Motorsteuerung. Das ECM verwendet das Signal zum Berechnen der Motorendrehzahl und der Position für eine genaue Steuerung von Einspritzung und Zündung. Das Signal wird auch dazu verwenden, Abweichungen bei der Motorendrehzahl aufgrund von Fehlzündungen usw. zu erkennen.
Ein induktiver CKP-Sensor besteht aus einem Stromkreis mit einer Drahtspule um einen Magneten. Dem Sensor ist ein Impulsrad zugeordnet, das sich typischerweise im Bereich des Umfangs des Schwungrads befindet. Das Impulsrad bewegt sich durch das Magnetfeld des Sensors, stört dieses und induziert somit eine Spannung im Stromkreis. Die induzierte Spannung ist abhängig von der Motorendrehzahl: Je schneller das Impulsrad rotiert, desto stärker ist die Störung des Magnetfelds.
Wenn sich die Mitte von Zahn oder Lücke am Sensor befindet, besteht eine gleichwertige und entgegengesetzte Störung des Magnetfelds und es wird keine Spannung induziert. Wenn sich dagegen die Vorder- oder Hinterkante eines Zahns am Sensor befindet, ist die Störung des Magnetfelds am stärksten und die induzierte Spannung ist am höchsten.
Positive Spannung wird erzeugt, wenn die Vorderkante näher als die Hinterkante ist; im umgekehrten Fall wird negative Spannung erzeugt.
Der fehlende Zahn am Impulsrad stellt die Hauptreferenzmarkierung für die Steuerung dar. Während sich die Lücke durch das Magnetfeld bewegt, sind die Störung und die Spannung für einen bestimmten Zeitraum vermindert. Außerdem liegen die Hinter- und Vorderkanten der Zähne, die sich unmittelbar vor und nach der Lücke befinden, weiter auseinander; daher erzeugen sie insgesamt ein stärkere Störung des Magnetfelds und eine höhere induzierte Spannung.
Das Signal des CKP-Sensors ist entscheidend für den Betrieb des ECM und dieses startet bzw. steuert den Motor nicht, wenn das Signal nicht gefunden wird oder gestört ist. Daher kann der Sensor die Ursache dafür sein, dass ein Motor beim Anlassen nicht startet oder abschaltet.
Mögliche Fehler sind:
Es gibt zwei Möglichkeiten der Anordnung eines zweipoligen CKP-Sensors und ECM-Kreises:
Auswahl an Fehlercodes (DTCs) im Zusammenhang mit der Komponente:
P0016
P0017
P0018
P0019
P0315
P0335
P0336
P0337
P0338
P0339
P0385
P0386
P0387
P0388
P0389
GT430-DE
Disclaimer
This help topic is subject to changes without notification. The information within is carefully checked and considered to be correct. This information is an example of our investigations and findings and is not a definitive procedure.
Pico Technology accepts no responsibility for inaccuracies. Each vehicle may be different and require unique test
settings.














