PicoScope 7 Automotive
Available for Windows, Mac, and Linux, the next evolution of our diagnostic scope software is now available.
Automotive guided tests
Library of examples on how to perform tests when using PicoScope.

Training
Our collection of training videos, articles, guides and information on training courses.

Waveform library
The Waveform Library is a global database of waveforms uploaded by PicoScope users.

Case studies
Real-life case studies show how the professionals use PicoScope to diagnose vehicle faults.

A to Z of PicoScope
Detailed description of various PicoScope software and hardware features.

Videos
Training resources and demonstrations on PicoScope and the Automotive Diagnostics Kit.

Newsletter
Archive of our monthly Automotive Newsletters.

Documentation
Download manuals, brochures, posters, and training materials.

Reviews and awards
Accolades for the preferred diagnostic tool for service centers and vehicle manufacturers.

Die Zahnrad-Bezugsmarken unten verweisen auf eine Reihe möglicher Bauteile:
|
|
|
Der Zweck dieses Tests ist, den Betrieb eines induktiven Kurbelwellenpositionssensors, nicht geerdet, zu bewerten. In der Regel wird er als potenzialfreier Kurbelwellenpositionssensor bezeichnet.
Beachten: Der korrekte Betrieb des induktiven potenzialfreien Kurbelwellenpositionssensors hängt von der Integrität seiner internen Spulenwicklungen, seinem Schaltkreis, seiner Anpassung an den Impulsgeber und der Luftspalte zwischen Kurbelwellensensor und dem Zahnrad ab.
Das nachstehende Testverfahren setzt voraus, dass alle oben genannten Konditionen ordnungsgemäß sind und der Kurbelwellenpositionssensor korrekt funktioniert. Sollten irgendwelche Defekte beim Betrieb des Sensors während dieser Tests identifiziert werden, heißt das nicht, dass der Kurbelwellensensor selbst defekt ist.
Der Sensor weist Funktionsmerkmale auf, die aufgrund von Schaltkreisfehlern, elektromagnetischen Störungen, mechanischen Defekten (Zahnrad/Zahnscheibe) oder Mess-/Anschlussfehlern nicht konsistent sind. Die Ergebnisse sind deshalb Symptome grundlegender Konditionen und somit nicht ein Ergebnis eines defekten Sensors. Deshalb ist es von höchster Wichtigkeit, eine grundsätzliche Inspektion aller oben genannten Bauteile durchzuführen, bevor die Messungen vorgenommen wurden, um eine Fehldiagnose des Sensors zu vermeiden.
Alle nummerischen Angaben auf dieser Hilfeseite sind spezifisch und nicht für alle Motorentypen anwendbar.
|
Zubehörteile |
PicoScope-Einstellungen
|
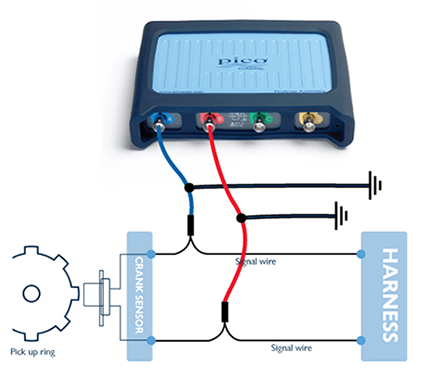
Der induktive, potenzialfreie Kurbelwellenpositionssensor benutzt in der Regel 2 Drähte; beide spiegeln Bilder des Kurbelwellengeschwindigkeitsignals wieder und werden oft von einem äußeren koaxialen Erdkabel geschirmt.
Um das korrekte Testergebnis zu erhalten, ist es sehr wichtig, die korrekte Richtung einer jeden Kurve zu bestimmen (siehe Diagnose):

Figure 2 - Example waveform
Alle Werte in dieser Beispielkurve sind kennzeichnend und nicht für jeden Fahrzeugtyp anwendbar.
N.B. Das Signal ist auf beiden Sensordrähten vorhanden.
Kanal A. Abbildung 2 gibt die AC-Ausgangsspannung des Kurbelwellenpositionssensors an, während der Motor im Leerlauf läuft. Kanal B: Zeigt die AC Ausgangsspannung an (Spiegelbild von Kanal A).
Ziehen Sie die technischen Daten des Fahrzeugs für spezielle Testbedingungen und Ergebnisse hinzu.
Typische Werte
Motorleerlaufdrehzahl (650-800 U/Min)
① Das Signallineal auf Null Volt muss durch die Mitte der Sensorkurve laufen.
② Zeigt die Zahnlücken des Sensor-Impulsgeberrads an, wird oft fälschlich für einen OT gehalten. Beachten Sie, dass die Kurvenrichtung von Kanal A und Kanal B unterschiedlich sind (siehe Anmerkungen zur Diagnose unten)
③ Mindestamplitude der Sensorsausgangsignalspannung, aufgrund der Reduktion der Kurbeldrehzahl als Ergebnis des Arbeitstakts (siehe Weitere Informationen unten).
④ Maximale Amplitude der Sensorsausgangsignalspannung, aufgrund der Erhöhung der Kurbeldrehzahl als Ergebnis des Arbeitstakts (siehe Weitere Informationen unten).
⑤ Zeit- und Umdrehungslineare zeigen eine Umdrehung der Kurbelwelle zwischen den Zahnlücken des Impulsgeberrads an. Die Beispielkurve bestätigt 35 Zähne in einer Kurbelwellenumdrehung mit einer Zahnlücke, die die Kurbelwellenposition angibt.
⑥ Zeigt die Motordrehzahl begründet auf der Position der Zeitlineale an ⑤. Zeitlineale, die auf nachfolgenden Zahnlücken des Impulsgeberrads platziert werden, ermöglichen es PicoScope, die Frequenz eines vollständigen Takts (Umdrehung) der Kurbelwelle zu errechnen. Sowohl die Frequenz und noch wichtiger, die U/Min werden dann an Punkt ⑥ angezeigt.
Das Steuergerät benutzt das Signal an beiden Drähten des potenzialfreien Sensors, um die Kurbelwellendrehzahl und Position zu bestimmen. Keiner der beiden Drähte wurde geerdet (deshalb der Begriff potenzialfrei), und sie spiegeln somit beide die Wechselspannung wieder, die vom Kurbelwellenpositionssensor generiert wurde. Das Steuergerät muss die korrekte Richtung des Signals auf dem entsprechenden Draht erhalten, um Motorendrehzahl und -position identifizieren zu können.
Kanal A zeigt die korrekte Richtung eines typischen Kurbelwellenpositionssignals an und gilt als Primär- oder Hauptsignaleingang, während Kanal B hier als Untersignaleingang bezeichnet wird. Beide Eingänge sind grundlegend miteinander identisch, aber ihre Richtung zum relevanten Kurbelwellensensordraht muss die korrekte sein.
Bitte beachten Sie das Herstellerhandbuch für Details zum Steuergerät und zu den Kurbelwellensensorpinnummern, um die korrekte Richtung des Sensorsignals am Steuergerät auf dem relevanten Draht sicherzustellen.
Um Haupt- und Untersignale zu identifizieren, beachten Sie Abbildung 3:

Figure 3 - Main and sub-signals
Da wir jedes potenzialfreie Kurbelwellensensorsignal mit Bezug auf unsere Prüfkabelmasse einzeln messen, sind wir nicht in der Lage, die wahre Amplitude des Sensorsignals zu messen. Für die meisten Anwendungen ist dies für Richtungs- und Zeitpunkt/Korrelationsprüfungen nicht relevant, aber sollte die wahre Amplitude suspekt sein, dann können wir einen sogenannten Mathematikkanal (Messkanal) anwenden (Kanal A - Kanal B), um die wahre Amplitude basiert auf die unterschiedlichen Spannungen von Haupt- und Untersignal anzuzeigen. Siehe Abbildung 4
Um den eingebauten MathematikkanalA-Bzu den erfassten Sensorsignalen anzuzeigen, wählen Sie: Tools > Mathematikkanäle >, aktivieren Sie das Kästchen neben A-B und wählen Sie OK. Ein dritter Mathematikkanal erscheint mit der Anzeige der wahren Amplitude des potenzialfreien Kurbelwellenpositionssensors.

Figure 4 - A-B Maths Channel and True amplitude
Das Steuergerät berechnet die Differentialspannung, die von den Haupt- und Untersignalen auf beiden Drähten des Sensors abgeleitet wird. Mithilfe des Mathematikkanals (A-B) oben, kann das Oszilloskop die wahre Amplitude des Kurbelwellenpositionssensors wie vom Steuergerät benutzt anzeigen, um Motorendrehzahl und -position zu identifizieren.
Der Kurbelwellenpositionssensor gilt als eine der fundamentalen Komponenten des modernen Motorsteuersystems. Während wunderbar einfach in seiner Konstruktion, gewährleistet die korrekte Anwendung dieses Sensors einen zuverlässig arbeitenden Motor. Um die Rolle, die der induktive Kurbelwellensensor spielt, wirklich schätzen zu können, müssen wir uns mit dem Funktionsprinzip, das der Wechselspannung zugrunde liegt, die von solch einem kritischen Bauteil erzeugt wird, vertraut machen. Wenn wir die Funktionen dieses Bauteils einmal verstanden haben, können wir auch die Ursache eines jeden Fehlers innerhalb unserer Kurve auswerten.
Der induktive Kurbelwellensensor besteht aus zwei grundlegenden Komponenten, einer Drahtspule, die um einen permanenten Magneten gewunden sind.

Figure 5 - CPS Operating principle
Jedes Ende der Drahtspule ist im Steuergerät angeschlossen, wo die erzeugte AC- Ausgangssignalspannung (an beiden Drähten vorhanden) vom Steuergerät benutzt wird, um die Kurbelwellendrehzahl und -position anzugeben (siehe Abbildung 5).
Das Permanentmagnet im Kurbelwellensensor erstellt auf natürliche Weise ein Magnetfeld um die Spulenwicklungen. Sollte ein metallischer Gegenstand in dieses Magnetfeld eindringen (in der Form unseres Impulsgeberrads), so ändert sich die Stärke des Magnetfelds und wird, je nach Drehzahl oder Fahrrichtung des Impulsgeberrads, erhöht oder vermindert (siehe Abbildung 6). Die Variationen im Magnetfeld haben den Soll-Effekt, eine Wechselspannung in Spulenwicklung einzuführen, die vom Steuergerät benutzt werden kann, Motorendrehzahl und -position anzuzeigen.
N.B Die Variation im Magnetfeld ist allein verantwortlich für die Einleitung einer Wechselspannung in die Spulenwicklungen. Wenn das Impulsgeberrad anhält, wird keine Spannung mehr erstellt, ganz gleich, in welcher Position das Impulsgeberrad im Verhältnis zum Kurvenwellenpositionssensor steht.

Figure 6

Figure 8
Die Kurbelwellensensorkurve enthält Aussetzer im Signal, wo das Impulsgeberrad (Zahnscheibe) eine vorsätzliche Lücke (fehlender Zahn oder fehlende Zähne) in den gleichmäßigen Abständen zwischen den Zähnen gelassen hat (siehe Abb. 7 und 3).
Das Steuergerät benutzt diesen Aussetzer im Signal, um die Position der Kurbelwelle zu identifizieren, die sich auf den OT beziehen kann oder nicht. Hersteller benutzen die Zahnlücken im Impulsgeberrad, um eine Anzahl von Kurbelwellenpositionen anzuzeigen. z. B. Kolben in linearer Stellung, (Motor in sicherer Stellung) OT, Anzahl der Grade vor OT, oder Sie können eine Kombination Zahnlücken zu Intervallen von 90 Grad wählen. Für eine präzise Bewertung des Kurbelwellenposition-Bezugssignals beachten Sie bitte das relevante Werkstatthandbuch.
Die Kurbelwellendrehzahlberechnung basiert auf der Frequenz des AC-Ausgangssignals vom Kurbelwellensensor. Indem die Drehzahl der Kurbelwelle ansteigt, erhöht sich auch die Frequenz des Sensor-Ausgangssignals in direktem Verhältnis dazu. Die Signalamplitude steigt ebenfalls an, wenn die Motorendrehzahl 20V AC zu höheren Motorendrehzahlen überschreitet (siehe Abb. 8).

Figure 8
Der Anstieg und Abfall der Frequenz/Amplitude kann sowohl auf Abbildung 2 als auch 3 gesehen werden, wo die Last, die während des Verdichtungstakts auf die Kurbelwelle platziert wurde, zu einer momentanen Reduktion der Wellendrehzahl führt ③. Hier können wir eine Verminderung der Frequenz und einen Abfall der Amplitude in direktem Kontrast zu ④sehen, wo die Kurbelwelle momentan kurz nach der OT Verdichtung (Arbeitstakt) eine höhere Drehzahl aufzeigt, was zu einer Erhöhung der Frequenz und einem Anstieg in der Amplitude führt.
Das Steuergerät benutzt diese Signalcharakteristiken, um die Beschleunigung und Verlangsamung der Kurbelwelle nach jedem Verbrennungsereignis anzuzeigen, um eine Fehlzündung oder eine schlechte Zylinderverteilung (Zylinderausgleich) zu erkennen. Vorausgesetzt alle Motorverdichtungs- und Verbrennungsereignisse sind gleichwertig, so müssten wir einen einheitlichen Anstieg und Abfall des Sensorsignals mit einer konstanten Kurbeldrehzahl erhalten.
Die Kurbeldrehzahl kann vom Sensorsignal berechnet werden, indem Zeitlineale an jeder Aussetzerstelle hintereinander platziert werden (Zahnlücke(n)), siehe Abbildung 2 ②.
Die meisten dieser Impulsgeberräder enthalten 36 oder 60 Zähne, wobei 1 oder 2 Zähne an einer einzigen Stelle um ihren Umfang herum fehlen. Durch Platzieren der Zeitliniare direkt auf die Aussetzerstellen zeigt 1 Kurbelwellenumdrehung an. In den obigen Beispielkurve sehen wir 35 Zähne zwischen den Zeitlinaren, folglich wird ein Zahnrad mit 35 Zähnen um seinen Umfang mit 1 fehlenden Zahn für die Motorpositionsbezugsmarke angegeben (36 Zähne - 1 Zahn = 1 Kurbelwellenumdrehung).
Platzieren eines Zeitlineals auf aufeinanderfolgenden Aussetzerstellen innerhalb der Kurve ermöglicht PicoScope, die Kurbelwellendrehzahl basiert auf der Frequenz der Kurbelwelle (Takte pro Sekunde) zu berechnen.
Auf Abbildung 2 wurde jedes Zeitlineal auf die Stelle der fehlenden Zähne positioniert ② (eine Kurbelwellenumdrehung), wobei die Frequenz zwischen den Zeitlinealen zu 13,45 Hz in der Frequenzlegende berechnet ⑥ wird.
Um die Frequenz auf U/Min umzuwandeln, multiplizieren wir 13,45 Hz einfach mit 60, um 807 U/Min zu erhalten. Sowohl der Frequenz- als auch der U/Min-Wert der Kurbelwelle wird auf der Frequenzlegende angezeigt⑥.
Am Kabelbaum des Fahrzeugs montierter und abgetrennter Kurbelwellenpositionssensor
Der Widerstandswert der Drahtspule, die um den Permanentmagnet gewickelt ist, sorgt für die Integrität des Sensors und ist sehr wichtig, um Ausgangspannung/Ausgangssignal zu korrigieren. Fehlerhafte Widerstandswerte oder ein Fahrzeugerdschluss führt zu einem Ausfall des Ausgangssignals.
Typische Sensordrahtspulen-Widerstandswerte sind von Hersteller zu Hersteller unterschiedlich, beachten Sie daher das relevante Werkstatthandbuch für die korrekten technischen Daten.
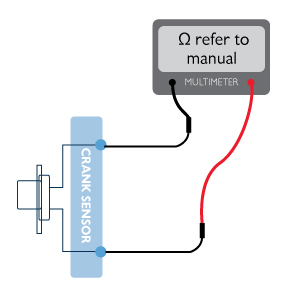
Um den Widerstandswert des Kurbelwellensensors zu testen, trennen Sie den Sensor vom Fahrzeug-Kabelbaum ab und schließen Sie einen Ohmmeter an, wie auf Abbildung 9 unten dargestellt wird:
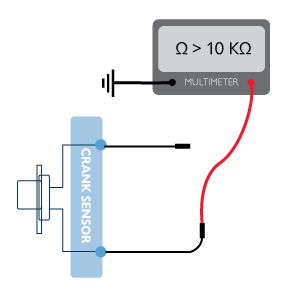
Da der Sensorwiderstandswert in den Daten zu finden ist, können Sie bei der Widerstandsprüfung auch gleich einen Erdschluss sehr schnell ausführen. Abbildung 10 zeigt an, wie der Ohmmeter angeschlossen wird, um zu bestätigen, dass kein Fahrzeugerdschluss vorhanden ist. Ein Wert höher als 10 kOhm genügt, um zu bestätigen, dass kein Erdschluss vorhanden ist (ein unendlicher oder Unterbrechungswiderstandswert ist erwünscht).
Am Kabelbaum des Fahrzeugs montierter und angeschlossener Kurbelwellenpositionssensor
Je nach Hersteller kann eine Vorspannung am Signaldraht des Sensors vorhanden sein. Die Vorspannung wird vom Steuergerät erstellt und wird als Diagnosehilfe von Sensor-Schaltkreisfehlern und Geräuschunterdrückung benutzt (Störungen von nahebei befindlichen elektrischen Bauteilen).
Um die Vorspannung zu messen, schließen Sie PicoScope genau wie oben in Ausführen des Tests (Abbildung 1) beschrieben wird, an, und führen Sie Schritte 1 bis 7 aus, gefolgt von:
8. Wählen Sie die Gleichstromkupplung Kanal A und Kanal B und reduzieren Sie den Spannungsbereich auf ±5 V (siehe Abbildung 11).
9. Schalten Sie die Zündung ein (den Motor nicht anlassen oder starten).
10. Drücken Sie den Stop-Taster in PicoScope, um die Erfassung aufzuhalten, und die Kurvenanalyse zu aktivieren.

Figure 11
Eine technische Prüfung des Kurbelwellensensors ist erforderlich, wenn die erhaltene Kurve eine Unstimmigkeit anzeigt. Die nachstehende Liste hebt einige wichtige Bereiche für Prüfungen hervor.
AT429-1(DE)
Disclaimer
This help topic is subject to changes without notification. The information within is carefully checked and considered to be correct. This information is an example of our investigations and findings and is not a definitive procedure.
Pico Technology accepts no responsibility for inaccuracies. Each vehicle may be different and require unique test
settings.